
Рефераты по геополитике
Рефераты по государству и праву
Рефераты по гражданскому праву и процессу
Рефераты по делопроизводству
Рефераты по кредитованию
Рефераты по естествознанию
Рефераты по истории техники
Рефераты по журналистике
Рефераты по зоологии
Рефераты по инвестициям
Рефераты по информатике
Исторические личности
Рефераты по кибернетике
Рефераты по коммуникации и связи
Рефераты по косметологии
Рефераты по криминалистике
Рефераты по криминологии
Рефераты по науке и технике
Рефераты по кулинарии
Рефераты по культурологии
Рефераты по зарубежной литературе
Рефераты по логике
Рефераты по логистике
Рефераты по маркетингу
Рефераты по международному публичному праву
Рефераты по международному частному праву
Рефераты по международным отношениям
Рефераты по культуре и искусству
Рефераты по менеджменту
Рефераты по металлургии
Рефераты по муниципальному праву
Рефераты по налогообложению
Рефераты по оккультизму и уфологии
Рефераты по педагогике
Рефераты по политологии
Рефераты по праву
Биографии
Рефераты по предпринимательству
Рефераты по психологии
Рефераты по радиоэлектронике
Рефераты по риторике
Рефераты по социологии
Рефераты по статистике
Рефераты по страхованию
Рефераты по строительству
Рефераты по схемотехнике
Рефераты по таможенной системе
Сочинения по литературе и русскому языку
Рефераты по теории государства и права
Рефераты по теории организации
Рефераты по теплотехнике
Рефераты по технологии
Рефераты по товароведению
Рефераты по транспорту
Рефераты по трудовому праву
Рефераты по туризму
Рефераты по уголовному праву и процессу
Рефераты по управлению
Реферат: Новые виды транспорта
Реферат: Новые виды транспорта
Содержание
Введение___________________________________________________________3
1. Электромобиль___________________________________________________4
2. Легкие электротранспортные средства_____________________________12
3. Автомобиль, движущийся по рельсам_______________________________17
4. Монокар________________________________________________________20
5. Беспилотные самолеты___________________________________________27
6. Гелиотранспорт_________________________________________________32
7. Монорельсовые дороги____________________________________________36
8. Моторвагонные поезда___________________________________________38
9. Комбинированные системы общественного рельсового транспорта_____43
10. Скоростной пассажирский трубопровод___________________________47
11. Индивидуальные летательные аппараты__________________________49
Заключение________________________________________________________52
Литература_______________________________________________________53
Введение
Во все времена и у всех народов транспорт играл важную роль. На современном этапе значение его неизмеримо выросло. Сегодня существование любого государства немыслимо без мощного транспорта.
В ХХ в. и в особенности во второй его половине произошли гигантские преобразования во всех частях света и областях человеческой деятельности. Рост населения, увеличение потребления материальных ресурсов, урбанизация, научно-техническая революция, а также естественно-географические, экономические, политические, социальные и другие фундаментальные факторы привели к тому, что транспорт мира получил невиданное развитие как в масштабном (количественном), так и в качественном отношениях. Наряду с ростом протяженности сети путей сообщения традиционные виды транспорта подверглись коренной реконструкции: значительно увеличился парк подвижного состава, во много раз поднялась его провозная способность, повысилась скорость движения. В то же время на первый план вышли транспортные проблемы. Эти проблемы по преимуществу относятся к городам и обусловлены чрезмерным развитие автомобилестроения. Гипертрофированный автомобильный парк крупных городов Европы, Азии и Америки вызывает постоянные пробки на улицах и лишает себя преимуществ быстрого и маневренного транспорта. Он же серьезно ухудшает экологическую обстановку.
Транспорт как особо динамичная система всегда был одним из первых потребителей достижений и открытий самых различных наук, включая фундаментальные. Более того, во многих случаях он выступал прямым заказчиком перед большой наукой и стимулировал ее собственное развитие. Трудно назвать область исследований, не имевшую отношения к транспорту. Особенное значение для его прогресса имели фундаментальные исследования в области таких наук, как математика, физика, механика, термодинамика, гидродинамика, оптика, химия, геология, астрономия, гидрология, биология и другие. В неменьшей степени транспорт нуждался и нуждается в результатах прикладных исследований, проводимых в области металлургии, машиностроения, электромеханики, строительной механики, телемеханики, автоматики, а в последнее время электроники и космонавтики. В свою очередь некоторые открытия и достижения, полученные в рамках собственно транспортных наук, обогащают другие науки и широко используются во многих нетранспортных сферах народного хозяйства.
Дальнейший прогресс транспорта требует использования последних, постоянно обновляемых результатов науки и передовой техники и технологии. Необходимость освоения возрастающих грузовых и пассажирских потоков, усложнение условий для сооружения транспортных линий в необжитых, трудных по топографии районах и крупных городах. Стремления повысить скорость сообщений и частоту отправления транспортных единиц, необходимость улучшения комфорта и снижения себестоимости перевозок – все это требует совершенствования не только существующих транспортных средств, но и поиска новых, которые могли бы более полно удовлетворить поставленным требованиям, чем традиционные виды транспорта. К настоящему моменту разработано и реализовано в виде постоянных или опытно-эксплуатационных установок несколько новых видов транспортных средств и значительно больше существует в виде проектов, патентов или просто идей.
Следует иметь в виду, что большинство так называемых новых видов транспорта в принципе предложены много лет назад, но они не получили применения и ныне повторно предлагаются или возрождаются на современной технической основе.
1.Электромобиль
Электромобиль - транспортное средство, ведущие колеса которого приводятся от электромотора, питаемого аккумуляторными батареями. Впервые появился он в Англии и во Франции в начале 80-х годов девятнадцатого века, то есть раньше автомобилей с двигателями внутреннего сгорания. Сконструированный И.В.Романовым в 1899 году кэб тоже был электрическим. Тяговый электродвигатель в таких машинах получал питание от батарей свинцовых аккумуляторов с энергоемкостью всего 20 ватт-часов на килограмм. В общем, чтобы питать двигатель мощностью в 20 киловатт в течение часа, требовался свинцовый аккумулятор массой в 1 тонну. Поэтому с изобретением двигателя внутреннего сгорания производство автомобилей стало стремительно набирать обороты, а об электромобилях забыли до возникновения серьезных экологических проблем. Во-первых, развитие парникового эффекта с последующим необратимым изменением климата и, во-вторых, снижение иммунитета многих людей вследствие нарушения основ генетической наследственности.
Данные проблемы были спровоцированы токсическими веществами, которые в достаточно больших количествах содержатся в отработавших газах двигателя внутреннего сгорания. Решение проблем состоит в снижении уровня токсичности отработавших газов, особенно окиси и двуокиси углерода, притом что объем производства автомобилей нарастает.
Ученые, проведя ряд исследований, наметили несколько направлений решения перечисленных задач, одной из которых является производство электромобилей. Это, по сути, первая технология, официально получившая статус нулевого выброса, и она уже представлена на рынке.
Чем привлекателен электромобиль, наверно, представляет каждый. В первую очередь, он почти не дает выброса вредных веществ. Ядовитых газов, попадающих в атмосферу при зарядке и разрядке аккумуляторных батарей, несравненно меньше, чем при работе двигателей внутреннего сгорания (ДВС). Чтобы отапливать электромобили зимой, на них устанавливают автономные обогреватели, потребляющие бензин или дизельное топливо. Но они, понятно, не загрязняют атмосферу так сильно, как ДВС.
Второе преимущество - простота устройства. Электродвигатель обладает очень привлекательной для транспортных средств характеристикой: на малых скоростях вращения у него большой крутящий момент, что очень важно, когда нужно тронуться с места или преодолеть трудный участок дороги. ДВС же развивает максимальный крутящий момент при средних оборотах, поэтому, если требуется большое усилие на малых, его приходится увеличивать с помощью коробки передач. Троллейбусы, например, в таком агрегате не нуждаются. Не требуется он и электромобилю, поэтому управлять им проще, чем автомобилем с механической коробкой передач.
Третье преимущество вытекает из второго. Электромобиль не требует столь тщательного ухода, как обычное авто: меньше регулировок, не потребляет много масла, проще система охлаждения, а топливная (если не считать отопитель) вообще отсутствует.
И все же электромобиль устроен не так просто, как может показаться: ему необходимы сложные преобразователи напряжения и много тяжелых и громоздких аккумуляторов, которые трудно разместить. Главный же недостаток, который сдерживает внедрение электромобилей, - малая энергоемкость батарей. Бак с бензином малолитражки весит около 50 кг, обеспечивая запас хода более полутысячи километров. Батареи весят обычно больше 100 кг (а то и несколько сотен), а пробег не превышает 100 км, причем при движении с небольшой скоростью.
Вопреки бытующему мнению о высокой экономичности аккумуляторных электромобилей, анализ показывает, что химическая энергия топлива, сжигаемого на электростанциях, используется для движения транспортного средства всего на 15% и менее. Это происходит из-за потерь энергии в линиях электропередачи, трансформаторах, преобразователях, зарядных устройствах для аккумуляторов и самих аккумуляторах, электромашинах, как в тяговом, так и в генераторном режимах, а также в тормозах при невозможности рекуперации энергии. Для сравнения, дизельный двигатель на оптимальном режиме преобразует в механическую энергию около 40% химической энергии топлива. При большом распространении аккумуляторных электромобилей, а особенно с учетом сказанного, им просто не будет хватать электроэнергии, вырабатываемой электростанциями мира. Не следует забывать, что суммарная установочная мощность двигателей всех автомобилей намного превышает мощность всех электростанций мира.
Проблемы снимаются при питании электромобилей от так называемых первичных источников электроэнергии, вырабатывающих энергию непосредственно из топлива. В первую очередь, такими источниками являются топливные элементы (ТЭ), потребляющие кислород и водород. Кислород можно забирать из воздуха, а водород, в принципе, можно запасать в сжатом или сжиженном виде, а также в так называемых гидридах. Но реальнее его получать из обычного автомобильного топлива прямо на электромобиле с помощью конвертора. Эффективность топливных элементов несколько снижается, но зато не меняется вся инфраструктура топливозаправочного хозяйства. КПД топливных элементов при этом все равно очень высок – около 50%.
Однако электромобиль с питанием от топливных элементов не лишен общего недостатка – высокой массы тяговых электродвигателей транспортных средств, рассчитанных как на максимальные мощность и крутящий момент, так и на максимальную частоту вращения. При этом добавляются и специфические недостатки, характерные для топливных элементов. Это, во-первых, невозможность рекуперации энергии при торможении, так как топливные элементы не являются аккумуляторами, то есть они не могут заряжаться электроэнергией, а во-вторых, низкая удельная мощность топливных элементов.
При огромной удельной энергии топливных элементов (порядка 400...600 Вт·ч/кг), удельная мощность при экономичном разряде не превышает 60 Вт/кг. Это делает массу топливных элементов для реальных мощностей, необходимых автомобилям, очень большой. Например, для электромобиля с максимальной потребной мощностью 100 кВт и электробуса с максимальной потребной мощностью 200 кВт, это соответствует массам топливных элементов 1670 и 3330 кг, соответственно. Если прибавить массы тяговых электродвигателей, примерно равные 150 и 400 кг, соответственно, то получаются массы силовых агрегатов, совершенно неприемлемые для легкового электромобиля, и требующие пятитонного прицепа для электробуса.
Делаются попытки снижения массы топливных элементов с использованием в качестве промежуточных источников энергии конденсаторных накопителей энергии, обладающих высокой удельной мощностью. Однако, и этот путь недостаточно эффективен, так как лучшие современные конденсаторные накопители, доступные для автомобильной техники, имеют удельные энергетические показатели около 0,55 Вт·ч/кг и 0,8 Вт·ч/литр. В таком случае для накопления всего 2 кВт·ч энергии (это значение рекомендовано специалистами как для электромобилей, так и для электробусов), потребуется около 3000 кг или 2,5 м3 конденсаторов, что нереально. Меньшие значения запасаемой энергии существенно снижают динамические качества машины. Кроме того, при коротком замыкании мощные конденсаторы могут загореться, что очень нежелательно для транспорта. Гораздо эффективнее использование в качестве промежуточного накопителя энергии супермаховика, соединенного с обратимой электромашиной.
Супермаховик – маховик, изготовленный навивкой из волокон или лент на упругий центр. Удельная энергия супермаховика на порядок больше значений данного параметра для лучших монолитных маховиков, к тому же он обладает свойством безопасного разрыва, не дающего осколков.
Такие схемы осуществлены в новейших опытных образцах гибридных электромобилей фирм Mechanical Technology Inc.(США), EDO Energy (США), и известной Ливерморской национальной лаборатории (LLNL, США). Удельная энергия супермаховиков из кевлара и графита, достигающая сотен Вт·ч/кг, снижает его необходимую массу до нескольких килограммов (при удельной энергии 200 Вт·ч/кг, для накопления 2 кВт·ч потребуется супермаховик массой всего 10 кг). Однако электромашина накопителя, необходимая здесь помимо тягового двигателя, и рассчитанная на максимальную мощность и поэтому весьма тяжелая, снижает эффективность этой схемы. К тому же она, как и тяговый двигатель должна быть обратимой (и мотором, и генератором), что дополнительно усложняет привод.
Оригинальную схему гибридного силового агрегата с маховичным накопителем и электромеханическим приводом предложила, изготовила и испытала фирма "BMW" (Германия). Несомненным преимуществом данного технического решения является наличие только одной электромашины, что снижает массу и приближает его к автомобильным схемам (рис. 1.1). Тип маховика фирма "BMW" в отчете не уточняет, поэтому используемый накопитель условно назван просто «маховичным».
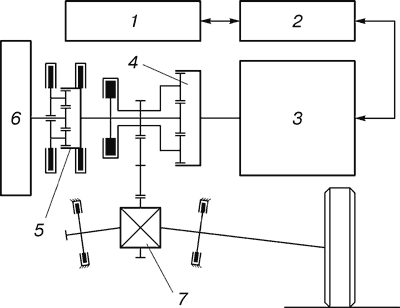
Рисунок 1.1. Схема гибридного силового агрегата с маховичным
накопителем и электромеханическим приводом фирмы "BMW" (Германия):
1 – источник тока; 2 – система управления; 3 – обратимая
электромашина; 4 – дифференциальный механизм; 5 – мультипликатор; 6
– маховичный накопитель; 7 – главная передача
Источник тока 1 через преобразователи и систему управления 2 связан с обратимой электромашиной 3, рассчитанной на максимальную мощность электромобиля. Электромашина 3 через сложный дифференциальный механизм 4 с мультипликатором 5 связана с маховиком 6 накопителя и главной передачей 7. В результате масса источника тока 1, например, топливного элемента, может быть выбрана исходя из удельной энергии, а не удельной мощности, что снижает ее для электромобиля и электробуса с пробегом, соответственно, 400 и 600 км до 100...150 и 700...1000 кг. Это вполне приемлемо для данных транспортных средств.
Однако непременным недостатком всех схем с электроприводом остается наличие тяжелого и сложного обратимого электродвигателя. Это отражается на экономичности привода и его массе, включая систему преобразователей тока. Мощная электромашина неэкономична при работе на малых мощностях, характерных для разгона (зарядки) маховичного накопителя. Кроме того, в схеме, помимо главной передачи, присутствует сложный по конструкции и управлению дифференциальный механизм с мультипликатором и тремя системами фрикционного управления (муфтами или тормозами), что усложняет и удорожает привод.
Новая концепция электромобиля, предложенная проф. Н.В. Гулиа, состоит в максимальном приближении и унификации устройств электро- и автомобиля. Это позволяет предельно упростить и уменьшить массу силового агрегата транспортного средства, увеличить его КПД и эффективность рекуперации энергии, а также сделать возможным использование существующих шасси автомобилей и автобусов для установки силовых агрегатов электромобилей и электробусов. Последнее обстоятельство должно существенно удешевить машины, в максимальной степени унифицировать их производство с возможностью оперативно менять соотношение количества машин различных типов и программу их выпуска. Кроме того, по желанию заказчика, транспортное средство может быть оснащено как источником механической энергии (обычным или гибридным тепловым двигателем), так и электрической (топливные элементы с супермаховиком), с установкой заменяемых агрегатов в том же двигательном отсеке при полном сохранении всей трансмиссии.
Такая трансмиссия должна быть рассчитана на перспективу, и включать уже не ступенчатую, а бесступенчатую коробку передач. Такие коробки передач уже достаточно широко выпускаются на основе ременных вариаторов с различными типами ремней («тянущих» и «толкающих»), и используются на автомобилях фирм Nissan, Honda, Fiat, Subaru и др.
Московский государственный индустриальный университет (МГИУ) в содружестве с АМО ЗиЛ ведет работы по разработке бесступенчатой коробки передач на основе нового планетарного дискового вариатора. Бесступенчатая коробка передач на основе дискового вариатора новой концепции может использоваться как на легковых, так и на грузовых автомобилях (в том числе и седельных тягачах) и автобусах.
Новый вариатор, рассчитанный на высокие значения крутящего момента достаточно низкооборотных двигателей автобусов, дает возможность применить новую концепцию электромобиля на мощных электробусах. Следует заметить, что для данной схемы не исключается использование бесступенчатой коробки передач любого типа, имеющей достаточную экономичность, малые габариты и массу, соизмеримые с существующими коробками передач.
Схема электромобиля новой концепции представлена на рис. 1.2.

Рисунок 1.2. Схема электромобиля новой концепции
Как и в других гибридных схемах электромобилей, источник электроэнергии выбирается исходя из критерия удельной энергии, что при исключительно высоком значении этого параметра обеспечивает малые массы, а также объемы топливных элементов. В данной схеме в качестве промежуточного источника энергии использован супермаховик с теми же энергетическими и массовыми параметрами, что и в других гибридных схемах с маховичным накопителем.
Принципиальным отличием данной концепции электромобиля от других гибридных схем является отбор мощности от источника электроэнергии необратимой электромашиной – специализированным разгонным электродвигателем малой мощности, соответствующей эффективной удельной мощности источника электроэнергии. Для упомянутых выше легкового электромобиля и электробуса это соответствует 15 и 20 кВт. Благодаря высокой частоте вращения разгонного электродвигателя – до 35000 об/мин для легкового электромобиля и 25000 об/мин для электробуса, что соответствует частоте вращения разгоняемых супермаховиков для накопителей этих машин, масса их весьма мала, соответственно 15 и 30 кг (это обычные показатели для отечественных конструкций авиационного назначения).
Источник энергии и разгонный электродвигатель могут быть объединены в один энергетический блок, сходный по массе и габаритам с демонтируемым с шасси двигателем и его системами. Топливный бак и система питания в принципе могут быть сохранены с добавлением конвертора для получения водорода из топлива.
Таким образом, в энергетическом блоке химическая энергия топлива преобразуется в механическую в виде вращения вала, совершенно так же, как и у теплового двигателя. Функцию сцепления выполняет выключатель, подключающий электромотор к источнику энергии.
Таким образом, по желанию заказчика в двигательный отсек может быть установлен любой преобразователь химической энергии топлива в механическую – тепловой двигатель или новый энергетический блок. Далее все, как и в обычном автомобиле, вал энергетического блока соединяется с коробкой передач, в данном случае бесступенчатой. Такая коробка передач уже в недалеком будущем заменит менее эффективные ступенчатые даже на обычных автомобилях. В результате мы получаем электромобиль новой концепции в максимальной степени унифицированный с обычным автомобилем.
Каковы же преимущества электромобиля новой концепции? По сравнению с автомобилем это несравненно более высокая эффективность использования топлива и экологическая безопасность. По сравнению со средним КПД преобразования химической энергии в механическую – порядка 10...15% у тепловых двигателей на автомобилях (не следует путать с КПД тепловых двигателей на оптимальном режиме – 30% у бензиновых двигателей и 40% у дизельных), этот КПД у топливных элементов с конвертором – 50%, а у кислородно-водородных топливных элементов – 70%. Вредные выхлопы у топливных элементов практически отсутствуют. Примерно такие же преимущества у электромобилей новой концепции по сравнению с аккумуляторными электромобилями, с той разницей, что вредные выбросы последних имеют место не на самой машине, а на электростанциях.
По сравнению с наиболее передовыми конструкциями гибридных систем электромобилей с топливными элементами и маховичными накопителями, например, схемой предложенной и осуществленной фирмой "BMW", преимуществом новой концепции является меньшие габаритно-массовые показатели и высший КПД электромашины. Это обусловлено тем, что в новой концепции электромашина не универсальная, обратимая, а узко специализированная, разгонная, загруженная практически постоянной мощностью, почти на порядок меньше максимальной и при высоких частотах вращения. Второе преимущество заключается в отсутствии сложного дифференциального механизма с тремя фрикционными муфтами или тормозами, переключающими режимы. Третье преимущество состоит в том, что процесс регулирования частот вращения и моментов от супермаховика до ведущих колес осуществляется не электроприводом, а механическим вариатором, имеющим высший КПД. В особенности это касается процесса рекуперации энергии при торможении, в результате которого кинетическая энергия машины переходит в супермаховик. Ни по частотной полноте передачи этой энергии, ни по КПД этого процесса, электротрансмиссия не идет ни в какое сравнение с механическим вариатором. И последнее преимущество, о котором уже говорилось – почти традиционная автомобильная схема и соизмеримые габаритно-массовые показатели нового энергетического блока с существующими двигателями, позволяют легко заменять один вид источника энергии на другой, получая при этом как автомобиль (с обычной или гибридной схемой двигателя), так и гибридный экономичный и динамичный электромобиль новой концепции.
На рис. 1.3 представлена схема городского электробуса новой концепции. Эта схема предоставляет устройству большую гибкость, чем в изображенной на рис. 1.2 структурной схеме.
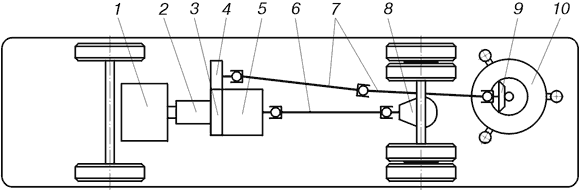
Рисунок 1.3. Схема городского электробуса новой концепции:
1– источник тока; 2 – электродвигатель; 3 – механизм реверса; 4 – коробка
отбора мощности; 5 – планетарный дисковый вариатор; 6, 7 – карданные передачи;
8 – главная передача; 9 – коническая зубчатая передача; 10 – супермаховичный
накопитель
Здесь блок супермаховичного накопителя 10, снабженный своим редуктором 9, расположен независимо от остальных агрегатов и мягко подвешен на раме для уменьшения и без того небольших гироскопических усилий при горизонтальном расположении супермаховика. С помощью коробки отбора мощности 4 и карданных передач 7 этот блок может связываться с вариатором 5 как независимо, так и совместно с электродвигателем 2. Этот электродвигатель может быть соединен с вариатором 5 и независимо от супермаховика, и играть роль полноценного тягового двигателя, в основном, на стационарных режимах движения. Несмотря на то, что электродвигатель 2 в этом случае несколько увеличивается по мощности и массе, энергоемкость супермаховичного накопителя может быть существенно снижена, реально до 0,5 кВт·ч. Это позволяет изготовлять супермаховик из такого стабильного и сравнительно дешевого материала, как стальная углеродистая проволока. Выход из строя (разрыв) супермаховика настолько безопасен, что тяжелого защитного кожуха, существенно превышающего по массе сам маховик, и необходимого при маховике из углепластиков, не требуется. Вариатор позволяет тяговому электродвигателю работать в эффективном диапазоне крутящих моментов и частот вращения, передавая только часть мощности, необходимой для движения электробуса, что благоприятно для его работы.
Но как бы там ни было - электромобили пользуются спросом. Более того, есть места, где они совершенно вне конкуренции. Скажем, поля для популярной в мире игры в гольф. Инвентарь и обслуживающий персонал перемещают на электромобилях упрощенной конструкции, порой без крыши, дверей, с облегченным, часто укороченным, кузовом, без систем безопасности - всего того, что заметно увеличивает массу автомобилей. Упрощенные машины хороши и для перевозок в закрытых помещениях: на складах, в цехах, где вредные выбросы нежелательны. Широко используют такие электромобили-тележки для перевозки туристов на курортах, в национальных парках, но здесь им труднее конкурировать с автомобилями.
Полноразмерные машины, предназначенные для движения по улицам городов, приживаются с трудом, хотя не исключено, что в скором будущем ситуация может измениться. А причину этому нужно искать... в климате американского штата Калифорния.
Выхлопные газы автомобилей под воздействием солнечных лучей образуют особо ядовитые вещества, так называемый смог. Для перенасыщенного машинами солнечного штата это - проблема номер один. Поэтому калифорнийские нормы токсичности выхлопа традиционно строже, чем в других штатах США, не говоря уже о Европе. Теперь здесь принят закон о постепенной замене автомобилей электромобилями: в 2003 году их должно быть - 10% от общего числа машин, а в 2010-м - 15%.
Многие ведущие автомобильные фирмы работают над электромобилями, тем не менее на выставках чаще увидишь машины малоизвестного происхождения. В выборе двигателя мнения конструкторов расходятся: используют и моторы постоянного тока, и переменного, например, асинхронный со специальными преобразователями и сложной системой регулирования. Напряжение питания также различно. Явное предпочтение отдают никель-кадмиевым батареям и свинцовым, в которых используется не жидкий электролит, а гель. Иногда применяют системы жидкостного охлаждения двигателей и поддержания теплового режима аккумуляторов.
Самый популярный в мире электромобиль изготовляют... в Польше. Уже выпущено более 200 тысяч штук. Электромобили "Мелекс" - упрощенного типа, на 2, 4 и 6 мест, рассчитаны на индустрию спорта и развлечений (назовем хотя бы тот же гольф), для складских работ, как цеховой транспорт. При собственной массе около 880 кг полезная нагрузка - 320, а с прицепом - более 900. Запас хода - 70 км. Максимальная скорость - до 23 км/ч - выдает назначение машины.
Другая фирма из Восточной Германии "Транспорт-Системтехник" создала 10 прототипов такси. Пятиместная машина с пластмассовым кузовом весит всего 600 кг, развивает 80 км/ч, имеет запас хода 140 км. Батареи - никель-металлогидридные. Конструкторам удалось сделать относительно просторную внутри машину при длине всего 2,5 м. САКСИ (то есть такси из Саксонии) обещают выпускать серийно через два года (рис.1.4).

Рисунок 1.4. САКСИ – такси из Саксонии.
В Японии автомобильная компания "Honda" финансирует проект создания парка сдаваемых в прокат малогабаритных электрических и "гибридных" машин, включающий новую технологию их эксплуатации. Осуществление этого проекта, получившего название "Intelligent Community Vehicle System" ("Региональная интеллектуальная транспортная система") - ICVS, по замыслу разработчиков, позволит существенно снизить вредное воздействие транспорта на окружающую среду, уменьшить вероятность заторов и улучшить условия парковки в зонах с высокой интенсивностью движения.
City Pal представляет собой малогабаритный переднеприводной электромобиль размерами 3210 х 1645 х 1645 мм с синхронным двигателем на постоянных магнитах. Его максимальная скорость 110 километров в час, запас хода на полностью заряженных аккумуляторах 130 километров. Несмотря на небольшие размеры, в электромобиле достаточно просторный для водителя и пассажира салон и багажник большой вместимости. City Pal оснащен кондиционером и современной навигационной системой. Кроме того, в нем есть оборудование для автоматического (беспилотного) управления и зарядки. Фото City Pal представлено на рис.1.5.
Рисунок 1.5. Двухместный электромобиль City Pal.
Сверхминиатюрный одноместный мини-электромобиль Step Deck предназначен для езды в густонаселенном городе. По всему периметру кузова машины снаружи установлены подножки-бамперы. Благодаря такой конструкции Step Deck можно парковать буквально вплотную к другим машинам в самых стесненных условиях. Габаритные размеры мини-электромобиля 2400 х 1185 х 1690 мм. На стоянке, предназначенной для одного обычного легкового автомобиля, можно разместить четыре такие машины. Комбинированная силовая установка с приводом на заднюю ось состоит из четырехтактного ДВС объемом 49 см3 с водяным охлаждением и синхронного электромотора с постоянными магнитами, что позволяет развивать скорость до 60 километров в час (рис.1.6).
Рисунок 1.6. Городской одноместный мини-электромобиль Step Deck.
Электромобили фирмы "Honda", задействованные в системе ICVS, взять напрокат не так просто. Для этого сначала следует приобрести специальную магнитную карточку IC. С ее помощью на терминалах ICVS можно выбрать наиболее подходящий для конкретной поездки один из четырех видов экипажей, оформить его аренду, вернуть экипаж на стоянку и оплатить прокат наличными или с банковского счета. Помимо этого карточка IC используется для запуска двигателя вместо обычных автомобильных ключей. Оформлением проката электромобиля занимается сам клиент практически без участия служащих терминала. Удобно и то, что не обязательно возвращать экипаж на ту же стоянку, на которой его арендовали, можно оставить или поменять электромобиль на любом другом терминале ICVS.
Контрольный центр ICVS получает всю оперативную информацию о месте нахождения того или иного экипажа по специальной радиосвязи. В случае необходимости оператор, используя внутреннюю радиосвязь и широкоугольные лазерные радары, может в автоматическом режиме направить в нужное место до четырех "беспилотных" экипажей. Для этого электромобили оснащены магнитными и ультразвуковыми сенсорами, взаимодействующими с индукционными кабелями, проложенными под покрытием терминала. Экипажи могут заезжать на стоянку, выезжать с нее и парковаться по команде из контрольного центра также без участия водителя. На терминалах ICVS предусмотрена автоматическая зарядка аккумуляторных батарей всех электромобилей.
2.Легкие электротранспортные средства
Из всех разновидностей электромобилей наибольший интерес с практической точки зрения представляют легкие электротранспортные средства (ЛЭТС) с комбинированным электрическим и чаще всего мускульным приводом. По мнению президента североамериканской компании "EV Global Motors" Ли Якокка, в скором времени электророллер, электроскутер, электромопед, одно- или двухместный мини-электромобиль, а чаще всего - электровелосипед будет стоять в гараже каждого американца. Согласно прогнозу, в ближайшие 10 лет ежегодный объем продаж индивидуального электротранспорта составит в мире 6-10 миллиардов долларов.
Всемирный велобум, охвативший практически все развитые и развивающиеся страны, в полной мере подтверждает предположение о том, что грядущее столетие будет веком велосипеда. По прогнозу американских специалистов, уже в первой четверти XXI века двухколесные педальные машины начнут вытеснять автомобили и постепенно станут основным средством передвижения. Обоснованность подобного прогноза подтверждает общая картина происходящего. В США и Германии - безусловных мировых лидерах по количеству легковых автомобилей на каждого жителя - ежегодно продается велосипедов больше, чем автомобилей. Бесконечную вереницу велосипедистов можно наблюдать на дорогах Дании, Голландии, Швеции и других стран Европы. В Японии практически каждый второй житель регулярно ездит на велосипеде, а Токио в часы пик буквально забит велосипедистами. Каждый день 500 миллионов человек ездят на велосипеде на работу в Китае. Во многих европейских мегаполисах вводится запрет на автомобильное движение в городских центрах и открываются бесплатные пункты проката велосипедов.
Невиданная популярность велосипеда не случайна, во многом она связана с негативными последствиями автомобилизации. Дело в том, что автомобиль, завоевав практически всю планету, стал главным потребителем невосполнимых природных ресурсов (нефти), загрязнителем земли, воды и воздуха и "производителем" шума. В автомобильных авариях ежегодно погибает людей больше, чем в иных кровопролитных войнах. Главная же опасность автомобиля, как утверждают медики, в том, что он отучил нас самостоятельно двигаться. Люди начинают понимать это и, чтобы бороться с гиподинамией, пересаживаются на велосипед.
Велосипед был первым изобретением, позволившим человеку перемещаться быстрее и дальше только за счет собственных мускулов. Но едва двухколесная машина появилась на свет, изобретатели стали думать над тем, как увеличить ее мощность и скорость. Начиная со второй половины прошлого века велосипед пытались оснастить дополнительным источником энергии: паровой машиной, электромотором, бензиновым и даже реактивным двигателем. Однако из-за большого веса, громоздкости и целого ряда других недостатков ни один из них на велосипеде не прижился. Тогда же, около ста лет назад, одновременно с электромобилями были сконструированы и первые электровелосипеды. Но очень скоро и те и другие, не выдержав конкуренции, уступили дорогу автомобилям, а сами надолго были забыты.
Второе рождение электровелосипеда произошло буквально на наших глазах. В 1994 году японская компания "Ямаха" начала выпуск нового велосипеда с дополнительным электроприводом, а сейчас конструкторы фирмы разрабатывают модели электровелосипедов уже третьего поколения. В прошлом году в одной только Японии было продано 250 тысяч таких двухколесных "гибридов". Вслед за "Ямахой" производством электровелосипедов одна за другой занялись компании "Хонда", "Панасоник", "Саньо", "Мицубиси" и "Судзуки". Специалисты прогнозируют, что через год-два на электровелосипедах будут ездить больше миллиона японцев.
Сегодня электровелосипеды выпускают все крупные велостроительные компании Азии, Америки и Европы. Власти Китая считают, что электровелосипеды способны заменить десятки тысяч чадящих и тарахтящих мотороллеров и мотоциклов и тем самым существенно улучшить транспортную ситуацию. В Шанхае, например, уже открыто 15 центров зарядки велосипедных аккумуляторов и более 100 пунктов их замены. Кроме того, планируется построить сеть аварийных зарядных станций, где любой велосипедист сможет, опустив в автомат монету и вставив вилку зарядного устройства в розетку электрозарядной колонки, быстро зарядить аккумулятор.
Современный электровелосипед - вполне комфортное, экологически чистое транспортное средство, требующее минимальных затрат на содержание и совсем мало места в гараже и на стоянке. Что касается скоростных качеств электровелосипеда, то на горизонтальном участке дороги его без особого труда может обогнать обычный спортивно-туристский велосипед. И дело тут не в низкой мощности мотора. Электровелосипед специально сконструирован так, что электропривод вырабатывает ток только тогда, когда велосипедист жмет на педали. Как только он перестает работать ногами или разгоняется до скорости 20-24 км/ч, мотор автоматически отключается. Хочешь ехать быстрее - крути педали.
На так называемых "тихих" электровелосипедах, развивающих скорость до 24 км/ч, электропривод выполняет вспомогательную функцию - с ним велосипедист затрачивает меньше усилий, что особенно важно в поездках на большие расстояния, при встречном ветре или подъеме в гору. Мощность электромотора не превышает 250 Вт - это величина, соизмеримая с мощностью, которую может достаточно долго развивать сам велосипедист. На электровелосипеде трогаются с места на одних педалях. Когда же скорость достигает 2-3 км/ч, специальный датчик на вилке приводного колеса автоматически включает мотор. Но есть электровелосипеды с более сложными датчиками, они включают электромотор сразу после трогания с места.
В Швейцарии и некоторых штатах США выпускают более мощные "быстрые" электровелосипеды, скорость которых не ограничивается 20-24 км/ч. На них устанавливают электромоторы мощностью 400 Вт и более, работающие независимо от педалей. Мощность двигателя и соответственно скорость регулируются ручкой "газа". На "быстром" электровелосипеде электрический привод играет основную роль, а мускульный - вспомогательную. Технические характеристики у такой машины примерно такие же, как у легкого мопеда. Ездить на "быстром" электровелосипеде можно только в защитном шлеме, с правами на управление мопедом и номерным знаком (его выдают вместе со страховым полисом). Привод электромотора передает усилие на переднее или заднее колесо велосипеда при помощи шестеренчатого редуктора, цепной передачи или фрикционного ролика, который прижимается к покрышке ведущего колеса (рис. 2.1).

Рисунок 2.1. "Быстрый" электровелосипед американской компании «EV Global Motors».
Вот уже несколько лет японские, тайваньские и немецкие фирмы выпускают электровелосипеды с мотор-колесами мощностью 200-250 Вт, которые встраиваются в ступицу. Идея мотор-колеса не нова, но до последнего времени эта конструкция не находила широкого применения. Использование мотор-колеса на электровелосипедах дало возможность отказаться от механической трансмиссии, а значит, значительно повысить эффективность электропривода. Специалисты считают, что управляемое бортовым микропроцессором мотор-колесо - наиболее удачная и перспективная конструкция привода электровелосипеда.
На электровелосипедах обычно применяют никель-кадмиевые аккумуляторные батареи емкостью 7-10 ампер-часов, весом 5-7 килограммов и более дешевые, но менее долговечные и энергоемкие, герметичные свинцово-цинковые аккумуляторы с желеобразным электролитом. Время зарядки аккумуляторной батареи - 4-5 часов, запас хода при полной зарядке - 20-30 километров и более. Хотя уже появились электровелосипеды третьего поколения, например "Старкросс" фирмы "Ямаха", с запасом хода свыше 40 километров. Есть и новые, пока еще достаточно дорогие никель-металлгидридные и никель-водородные аккумуляторы, увеличивающие пробег электровелосипеда без подзарядки до 50 километров.
В США, Японии, Германии и других, наиболее развитых, странах уже сейчас электровелосипед вполне может заменить второй семейный автомобиль, который обычно используют для поездок на расстояние в среднем до 15 километров, например на работу или за покупками. Особенно он пригодится не слишком спортивным и пожилым людям, всем тем, кто осознает необходимость умеренных, но регулярных физических нагрузок. В гараже, на стоянке, на проезжей части электровелосипед занимает места во много раз меньше, чем малогабаритный автомобиль. И самое главное, он не загрязняет окружающую среду.
В последнее время "электротранспортным островом" стали называть Тайвань. Пять лет назад здесь насчитывалось всего 67 электромопедов и электромотоциклов, а в прошлом году их продали уже около пяти тысяч. Правительственное агентство по охране окружающей среды (ЕРА) установило квоту на продажу этих электротранспортных средств в размере не менее 2% от объема продаж мопедов, мотороллеров и мотоциклов. По прогнозам, в нынешнем году объем продаж электромопедов и электромотоциклов возрастет в три раза и составит 16 тысяч штук. Государство компенсирует часть затрат на приобретение электротранспортных средств таким образом, чтобы для покупателя их стоимость была сопоставимой с ценой мопедов и мотороллеров с объемом двигателя 50 смз.
Электровелобум можно наблюдать и в Италии. В декабре 1998 года в историческом центре итальянской столицы, где ежегодно бывают миллионы туристов, начали создавать парк сдаваемых в прокат электророллеров и сеть электрозарядных станций. Этот проект финансируют муниципалитет Рима, Министерство защиты окружающей среды, ассоциации WWF и "Italia Nostra". Строительством зарядных станций и организацией проката электророллеров Lepton занимается итальянская компания "Atala Rizzato". На первом этапе планируется открыть 85 станций для "медленной" шести-, семичасовой зарядки аккумуляторов с использованием 16-амперных зарядных устройств и 30 станций для "быстрой" одно-, полуторачасовой зарядки. Первые рассчитаны на одновременную зарядку аккумуляторных батарей четырех экипажей, а вторые - только двух. Все станции строятся в местах парковки, на них можно будет заряжать аккумуляторы как муниципальных, так и частных электророллеров, электровелосипедов и электромобилей. Ориентировочная стоимость проката электророллера - 1,3-1,8 доллара в час.
В западных странах "тихие" электровелосипеды, у которых мотор лишь помогает движению, наиболее популярны среди людей старше 40 лет. Больше всего на них ездят в Японии и европейских странах. Молодежь привлекают скоростные модели с мощным электроприводом и современным дизайном. На "быстрых" электровелосипедах можно изменять мощность мотора, а постоянно крутить педали необязательно. Они доминируют в США и Китае. Фото "тихого" электровелосипеда представлено на рис. 2.2.

Рисунок 2.2. "Тихий" электровелосипед тайбейской фирмы "Elebike Co., Ltd" с мотор-колесом постоянного тока мощностью 250 Вт, напряжением 36 В и со свинцово-цинковой аккумулятор ной батареей емкостью 7 ампер-часов (в пластиковом корпусе на наклонной раме).
Цены на электровелосипеды в Европе, Японии и США колеблются от 1000 до 2000 долларов. Самые дешевые - в Китае и на Тайване, там их можно приобрести за 200-350 долларов. Еще дешевле купить обычный велосипед и самому или в мастерской поставить на него комплект электропривода: мотор, аккумуляторную батарею, зарядное устройство, электронный блок, пульт и ручку управления. Одна из моделей элктровелосипедов, пользующихся спросом, представлена на рис. 2.3.

Рисунок 2.3. Электровелосипед "Dracle" японской фирмы "Panasonic"
По прогнозу специалистов, к 2003 году количество электровелосипедов в мире превысит два миллиона.
По материалам, предоставленным компанией "Honda", она будет производить четыре базовых экипажа: двухместный электромобиль City Pal, одноместный экипаж с комбинированной двигательной установкой Step Deck, одноместный электророллер Mon Pal и электровелосипед Raccon.
Одноместный электророллер Mon Pal (рис. 2.4) очень удобен для повседневных поездок на небольшие расстояния. Его скорость не более 6 километров в час. Электророллер вполне подходит для езды в пешеходных зонах, на садово-парковых дорожках, в больших торговых и выставочных помещениях, что наверняка понравится людям пожилого возраста. Габаритные размеры Mon Pal - 1450 х 690 х 1080 мм (1625 мм с тентом). Привод коллекторного электродвигателя постоянного тока осуществляется на заднюю ось.
Рисунок 2.4. Электророллер для пожилых людей Mon Pal.
Электровелосипед Raccon 26LX-3В (рис. 2.5) хорош тем, что требует от велосипедиста значительно меньше усилий при езде на большие расстояния, на затяжных подъемах и против ветра, чем все другие модели. Его вес 31 кг, габаритные размеры 1885 х 580 х 770-920 мм (в зависимости от высоты седла). Электровелосипед оборудован передним и задним багажниками на 4 и 10 кг. Raccon снабжен малогабаритным коллекторным двигателем постоянного тока напряжением 24 В, мощностью 220 Вт и компактной никель-кадмиевой аккумуляторной батареей емкостью 5 А.ч размером с не очень толстую книгу формата А4. Полностью заряженной аккумуляторной батареи, которую обычно помещают на раме позади переднего багажника, хватает на то, чтобы проехать 27 километров и при этом освещать дорогу фарой с лампой мощностью 3,8 Вт. Магнитные датчики скорости и электронный блок управления равномерно увеличивают мощность электропривода при возрастании скорости движения от 0 до 15 километров в час и обеспечивают постоянную мощность в интервале скоростей 15-23 километра в час. На большей скорости электродвигатель автоматически отключается. Хочешь ехать быстрее - крути педали!

Рисунок 2.5. Электровелосипед Raccon фирмы "Honda".
3.Автомобили, движущиеся по рельсам
Среди многочисленных проектов, которые призваны решить проблему перегруженности транспортных сетей мегаполисов, всё чаще встречаются предложения направить городской транспорт, в том числе и автомобили, по рельсам.
Один из самых смелых проектов представила датская компания RUF International. Предлагаемая датчанами транспортная система представляет собой сеть монорельсовых дорог, по которым движется общественный и личный электротранспорт.
Небольшие участки пути транспорт преодолевает по обычным дорогам, после чего въезжает на рельсы и объединяется в своеобразные поезда.
Конструкция автомобиля, движущегося по рельсам представлена на рис. 3.1

Рисунок 3.1. Конструкция автомобиля, движущегося по рельсам
Вставшим на рельсы транспортом не нужно управлять — водитель задаёт программу и может спать, читать, выходить в Интернет или смотреть телевизор — информация передаётся некоему "главному диспетчеру" и автоматическая система всё сделает сама, руководствуясь показаниями установленных повсюду, в том числе и под землёй, датчиков.
В случае необходимости, водитель сможет снова взять управление на себя. Подразумевается, что скорость езды по рельсам будет 120 км/час.
Согласно проекту RUF International, сеть дорог будет состоять из 25-километровых рельсовых участков со специальными "переходами" через каждые пять километров, чтобы одни водители могли присоединиться к "поезду", а другие свернуть или съехать с рельсов (рис.3.2-3.3). Максимальная скорость между "переходами" (150 км/час) при приближении к развязкам автоматически снижается до 30 км/час.

Рисунок 3.2. Переход на кольцевую линию

Рисунок 3.3. Переход с рельсов в дорожное полотно
Участки пути без рельсов также автоматизированы: установленные под землёй датчики образуют своеобразный фарватер, так что водитель может совсем не управлять своим авто.
Энергия для электромобилей подаётся непосредственно по монорельсу — это и обеспечивает электропитание во время движения в "поезде", и заряжает аккумуляторы для непродолжительной езды по обычным дорогам.
По прибытии к месту назначения водитель выходит из машины и отправляется по своим делам — автоматика сама отправит автомобиль на ближайшую стоянку, откуда хозяин может вызвать его для продолжения пути.
Есть и другой вариант — безо всяких стоянок, когда каждый может использовать первый попавшийся автомобиль. В качестве защиты от вандализма разработчики предлагают следующую схему: при входе в машину водитель "предъявляет" некую карту, удостоверяющую личность, которую машина идентифицирует.
Машина "запоминает" того, кто последним ездил на ней, а новый водитель должен будет при входе в авто оценить его состояние. Только в случае "приёмки" машины новый водитель идентифицируется и на некоторое время становится её владельцем.
Машины для транспортной системы RAF могут быть любыми — "легковушка", грузовик, автобус — но для езды по рельсам у всех у них должен быть V-образный канал, проходящий по днищу кузова машины (рис. 3.4).

Рисунок 3.4. Конструкция рельсов
"Прорезь" проходит посередине и внутри делит салон на две части. Разработчики предлагают использовать "бугор" в качестве подлокотника или "места для ребёнка".
Монорельсовая система предназначена для крупных городов, но авторы проекта не забыли и о жителях пригородной зоны: предусмотрен гибридный транспорт с электрическим и топливным двигателями. Например, общественный пригородный транспорт, названный Maxi-RUF, — это автобус, который может перевозить десять пассажиров, не считая водителя.
Компания работает над своей концепцией с 1988 года. У RUF International 16 спонсоров, в числе которых нет ни одного автопроизводителя, но есть датский филиал Siemens и датские же министерства энергетики и окружающей среды.
Над аналогичным, но куда более реалистичным проектом работают англичане. Монорельсовый проект под названием ULTra (Urban Light Transport) компании Advanced Transport Systems впервые будет реализован в 2004 году. А в январе 2002 года запустили экспериментальную ветвь неподалёку от Бристоля в городе Кардифф (рис.3.5). Если результаты тестов будут признаны удовлетворительными, сети ULTra построят сначала в Кардиффе, а потом и в других городах Великобритании.

Рисунок 3.5. Фото экспериментальной ветви в Кардиффе
ULTra — это одна из форм персонального скоростного транспорта (Personal Rapid Transit — PRT). По сути, это монорельсовая дорога, по которой движутся небольшие полностью автоматизированные вагонетки — наземное метро, только без машинистов и, собственно, поездов.
Похожие на капсулы небольшие вагонетки, рассчитанные на несколько человек, будут двигаться по монорельсу со скоростью 25 км/час.
Проект ULTra, который ещё называют "такси без водителя" (driverless taxi), Advanced Transport Systems разрабатывала совместно со специалистами из Бристольского университета.
Первая построенная в Кардиффе испытательная "ветка", по которой будет двигаться 30 "капсул", будет протяжённостью 1,5 км. В развитой сети количество вагонеток увеличится до 120. Движение каждой "капсулы" будет контролироваться центральной системой посредством всевозможных датчиков.
Посадка-высадка пассажиров будет осуществляться на специальных станциях. Нужно отметить, что "капсулы" не останавливаются на главной трассе, а подъезжают к станциям по отдельным путям.
При входе пассажир должен будет вставить в "приёмник" смарт-карту, на которой и будет обозначен маршрут его поездки. Возможно, посредством этой карты будет производиться и оплата за проезд (тариф такой же, как и за проезд в автобусе).
Разработчики утверждают, что, во-первых, их электротранспорт не загрязняет окружающую среду, во-вторых — он лёгкий (вес вагонетки 800 кг), в-третьих, им удалось "минимизировать визуальное вторжение" в архитектурный облик городов и окружающую среду, и, наконец, ULTra — безопасный транспорт.
Действительно, при скорости 25 км/час (а вблизи остановок 5 км/час) мало что может случиться. Тем не менее, каждая вагонетка оборудована специальной "системой обнаружения", которая автоматически остановит "капсулу", если впереди препятствие.
Поломка (вероятность любой из них, по мнению создателей, крайне мала) одной из вагонеток не блокирует всю транспортную систему, а встроенная "система контроля" передаст сигнал в "Центр".
Система предназначена исключительно для городов и, по признанию разработчиков, не заменит автобусы и автомобили, а станет лишь дополнением к существующим видам общественного транспорта.
4.Монокар
В современном мире существуют два основных типа транспортных средств.
АВТОМОБИЛИ имеют более высокий комфорт, безопасность, грузоподъемность и т.д., но нельзя не отметить и тот факт, что существующая концепция четырехколесного транспортного средства (автомобиля) не менялась со времен появления телеги и уже не удовлетворяет современным требованиям по маневренности, экономичности, уровню выбросов в окружающую среду и т.п.
МОТОЦИКЛЫ отличаются предельной простотой и надежностью конструкции. Это рама с седлом, двигатель и колеса, переднее из которых - поворотное. Они обладают высокой маневренностью и проходимостью, но практически не защищают водителя от погодных условий, не обеспечивают его безопасность, поэтому почти вытеснены автомобилями.
Но существует концепция, которая объединяет преимущества мотоциклов и автомобилей. Это машина с кузовом автомобиля и двухколесной конструкцией ходовой части. Такая машина (монокар) может обладать комфортом, грузоподъемностью и безопасностью автомобиля и маневренностью, экономичностью и проходимостью мотоцикла.
Устойчивость мотоцикла зависит от равновесия действующих на него сил. Мотоцикл может быть устойчивым только при совпадении точки опоры и равнодействующих сил. При прямолинейном движении такая сила одна. Это сила тяжести, приложенная к центру масс и направленная вертикально вниз. Отклонений от точки опоры она не имеет, следовательно, нет и опрокидывающей силы.
При движении по окружности на машину действует еще и центробежная сила, направленная наружу и создающая опрокидывающий момент. Для удержания машины в равновесии равнодействующая этих сил должна проходить через точку опоры. В мотоциклах баланс достигается либо отклонением водителя в сторону, противоположную опрокидывающему моменту, либо поворотом руля в сторону наклона машины. То есть либо центр тяжести отклоняется до совпадения с точкой опоры, либо точка опоры отклоняется к центру тяжести. При этом равновесие должно поддерживаться с высокой точностью, в противном случае неизбежно опрокидывание мотоцикла в сторону наибольшей действующей силы. Следовательно, устойчивость мотоцикла при движении по окружности зависит от:
1. Скорости движения мотоцикла
2. Радиуса поворота
3. Угла наклона мотоцикла
4. Смещения вылета переднего колеса
Предельный угол наклона машины зависит от конструкции и формы кузова машины. Существует зависимость скорости движения и безопасного радиуса поворота.
V2 = g * R* ctg a,
где V - скорость движения мотоцикла, м/сек,
g - ускорение свободного падения, 9,8 м/сек2,
R - радиус поворота мотоцикла, м,
ctg a - котангенс угла наклона.
При выполнении этих условий переднее колесо нужно поворачивать к центру вращения.
Если требуется пройти поворот с большей скоростью, то мотоцикл должен наклоняться на больший угол при вхождении в поворот и переднее колесо мотоцикла должно быть повернуто в сторону, противоположную повороту. Это делается для большего смещения точки опоры мотоцикла к центру тяжести. Если для сохранения равновесия этого недостаточно, то водитель отклоняет тело от центра вращения до совпадения равнодействующих сил и точки опоры. Для одноколейного транспортного средства подобные маневры могут быть невозможны из-за более широкого кузова.
Ошибочно считают, что при этом на мотоцикл оказывает влияние гироскопический момент колес. Влияние его незначительно, так как при массе покрышки и обода 3кг, скорости вращения 833 об/мин и скорости поворота руля 0,2 об/мин гироскопический момент колеса равен: 0,35кг. В то же время отклонение центра тяжести или точки опоры мотоцикла на 10 см при высоте центра тяжести 100 см и массе мотоцикла и водителя 140 кг создает отклоняющую силу в 14 кг.
Таким образом, при повороте дополнительное отклонение центра тяжести от точки опоры в килограммах должно быть равно восстанавливающей силе гироскопического момента маховика в килограммах.
Наверное, каждый видел, как на мотогонках мотоциклист, не вписавшись в поворот, скользит по земле в сторону заноса, а следом кувыркается его мотоцикл. Это может произойти с каждой двухколесной машиной. Отличительной особенностью любой двухколесной машины является то, что на виражах она может наклоняться к центру поворота. Это позволяет проходить повороты без заносов с большим ускорением. Но только до тех пор, пока центробежная сила не превысит силу трения. И тогда вылет на обочину неизбежен.
Для двухколесных машин существует определенная зависимость предельного угла наклона от радиуса поворота. Угол наклона монокара зависит от особенностей конструкции, например, ограничен размерами кузова (35 градусов). Если вывернуть руль слишком круто, то монокар ляжет на бок и будет скользить на нем по дороге в сторону заноса. Кувыркатся подобно мотоциклу монокар не сможет из-за маховика. У него слишком большой гироскопический момент сил. Скорее всего, он будет поворачиватся вокруг точки контакта, да и то вряд ли. Водитель и пассажир, разумеется, останутся внутри. Ощущения у них, наверное, будут не из приятных, но каких-либо повреждений или травм им удастся избежать. Их даже внутри кузова болтать не будет, поскольку вектор центробежной силы только вдавит их в кресло.
На выступающей части кузова слева и справа можно установить небольшую площадку - опору. Тогда в случае крутого разворота монокар ляжет не на кузов, а на опору. Это позволит в прямом и переносном смысле слове сделать КРУТОЙ разворот.
Для сохранения равновесия одноколейных транспортных средств можно использовать маховик, который также используется и для рекуперации энергии при разгонах и торможениях. Задача маховика заключается в компенсации возникающих возможных отклонений. Восстанавливающая сила маховика зависит от скорости его вращения. При снижении скорости вращения маховика с горизонтальной осью вращения он начинает отклоняться от вертикали на угол, определяемый равнодействующей силы тяжести и восстанавливающего гироскопического момента.
На остановке гироскопический момент маховика будет максимальным, удерживая машину в вертикальном положении, а при увеличении скорости он будет постепенно снижаться, позволяя наклонять машину для совершения поворотов, так как энергия маховика должна расходоваться на движение машины.
В некоторых конструкциях ось вращения маховика была горизонтальна и маховик вращался в ту же сторону, что и колеса. Наклон такого маховика влево вызывает дополнительный поворот машины влево. Это может облегчить вхождение в поворот, но может служить и дестабилизирующим фактором.
Из этого следует вывод: если направление вращения маховика с горизонтальной осью вращения совпадает с направлением вращения колес, то такая машина более маневренна, но менее устойчива. И, соответственно, наоборот.
Если ось вращения маховика вертикальна, то ее следует отклонять вперед-назад. Но при вертикальной оси гироскопический эффект может вносить дополнительный занос в поворот (подобно винту одноосного вертолета), и понадобиться ставить второй маховик с противоположным направлением вращения. Кроме того, маховик с вертикальной осью обладает дестабилизирующим фактором. При движении в гору или под гору на машину будет дополнительно влиять гироскопический момент, отклоняющий машину вправо или влево. Для компенсации такого эффекта потребуется компенсирующее отклонение руля или установка дополнительного маховика с противоположным направлением вращения.
На гирокаре П.П. Шиловского маховик крепился на раме, позволяющей отклонять его ось, восстанавливая тем самым равновесие машины. Рама отклонялась по сигналу датчиков крена. Можно вместо рамы дополнительно поворачивать или наклонять переднее колесо до совпадения точки опоры с центром тяжести. Поворачивать колесо можно также по сигналу датчика крена.
Но если удастся найти точную зависимость между влияющими на машину силами, то можно будет обойтись и без датчиков крена и т.д.
Зависимости:
· отклонение от точки опоры зависит от угла поворота переднего колеса
· угол поворота переднего колеса зависит от радиуса поворота машины
· радиус поворота зависит от скорости движения машины
· скорость вращения маховика зависит от скорости движения машины
· восстанавливающая сила маховика зависит от скорости его вращения
· от направления вращения маховика с горизонтальной осью зависит устойчивость и маневренность машины
· от предельной скорости движения зависит мощность двигателя
Применение маховика на автомобиле имеет следующие преимущества:
· снижение расхода топлива вдвое за счет рекуперации (возврата) энергии
· уменьшение требуемой мощности двигателя до 40 %
· возможность работы двигателя в точке оптимального режима
· устранение различных систем пуска двигателя и режима холостого хода
· более эффективное (безюзовое) торможение
Удельный расход топлива минимален при работе двигателя примерно на 80 % мощности и раза в 3-4 выше при 10 % процентах. Однако именно эти 10 % процентов и требуются при городском движении большую часть времени. В городском режиме движения также большая часть энергии расходуется при часто чередующихся разгонах и торможениях. Для снижения таких расходов наиболее реально применение гибридных двигателей, представляющих собой маховик в сочетании с двигателем внутреннего сгорания или электромотором.
Двигатель, работая на режиме максимальной экономичности, "закачивает" в него энергию, поддерживая частоту вращения в определенном диапазоне. Энергия, необходимая для движения автомобиля, отбирается через бесступенчатую передачу. В случае торможения кинетическая энергия автомобиля переходит обратно в маховик.
Монокар позволяет уменьшить потери энергии за счет таких решений:
Масса машины. Для снижения массы можно значительно упростить и облегчить конструкцию, удалив некоторые узлы и агрегаты. На монокаре могут не потребоваться двигатель большой мощности (и массы), КПП, радиатор, стартер, генератор, подвеска двух колес, трансмиссия и многое другое. монокар можно сделать приблизительно раза в два легче обычной машины.
Аэродинамическое сопротивление. Создание кузова более обтекаемой формы. Современный автомобиль имеет коэффициент аэродинамического сопротивления Cx=0,4. Если попробовать сделать трехместный кузов в виде капли и разместить двух человек в широкой части и одного сзади в узкой, то можно получить коэфффициент Cx=0,2 или даже меньше. Но подобную форму можно применить только на двухколесной машине, поскольку четыре колеса все равно потребуют прямоугольной формы со всеми вытекающими последствиями.
У большинства современных автомобилей он составляет 0,4. У монокара, благодаря более обтекаемой конструкции двухколесного кузова, он может быть равен 0,2 или даже меньше.
Зависимость мощности от скорости представлена на рис. 4.1.
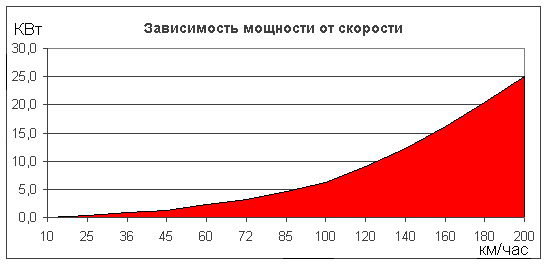
Рисунок 4.1. Зависимость мощности от скорости
F = C х * Sm * P * V2
где F - сила сопротивления среды, H
Cx - коэффициент аэродинамического сопротивления,
Sm - мидель, м2
P - плотность среды,
V - скорость, м/с
Что составляет 0.2 * 1.22 * 1.2 * 767 = 224 Н при 100 км/час
Для пробега в 100 км потребуется 224 * 100.000 = 22.400.000 Дж, что составляет мощность в 6.2 кВт. (8,4 л.с) при 100 км/час или 3,2 кВт при скорости 72 км/час или 833 Вт при 36 км/час
КПД двигателя. Желательно отказаться от двигателя внутреннего сгорания с КПД 18-20% и применять электродвигатель (КПД 90%). Существенно снизить требуемую мощность двигателя может применение маховика.
Рекуперация энергии. Применение маховика для рекуперации (накопления) энергии торможения с последующей отдачей при разгоне. Если в обычных машинах эта энергия расходуется только на нагрев тормозных колодок, то с применением маховика удается значительно (почти в 2 раза) снизить расход топлива по сравнению с движением в городском режиме.
Сопротивление дороги. Двухколесному монокару потребуется значительно меньше энергии на преодоление сопротивления дороги.
4000H * 0,02 = 80 H
Для пробега в 100 км потребуется 80 * 100.000 = 8.000.000 Дж, что составляет мощность 2.2 кВт/час. (3 л.с.)
Конструкция машины представлена на рис.4.2.
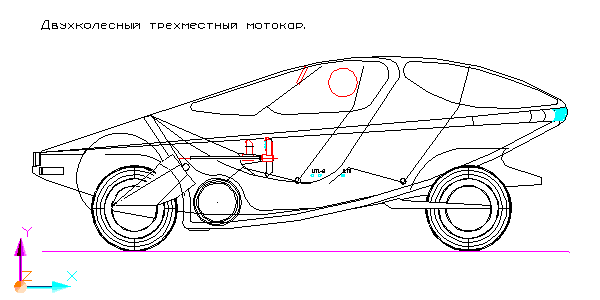
Рисунок 4.2. Конструкция монокара
В центре машины между сиденьями водителя и пассажира размещен маховик. Над маховиком - ручка управления типа "джойстик". Непосредственно перед маховиком - узел крепления передней подвески. Сиденье заднего пассажира размещено точно по центру между передними сиденьями. За задним сиденьем небольшой багажник. Под багажником -подвеска заднего колеса.
Кузов представляет собой конструкцию из металлического каркаса и навесных элементов облицовки. Продольно в центре машины находится силовая рама с маховиком и подвесками колес. Кузов двухдверный, с вертикальным открыванием дверей относительно середины лобового стекла. Машина имеет 2 небольших багажника по бокам колесной ниши переднего колеса. Над колесной нишей заднего колеса багажников нет в целях улучшения аэродинамики кузова.
Решением многих проблем монокара будет применение так называемых мотор-колес. Причем технологически оправдано применение трех однотипных мотор-колес. Двух непосредственно в колесах и одного в качестве маховика. Они будут отличаться только максимальной скоростью вращения и массой ротора. Для маховика масса ротора должна быть не менее 20 кг.
Таким образом, вся кинематика машины будет состоять только из двух колес, маховика и электронного блока управления. Блок управления нужен для передачи энергии с маховика на колеса и обратно.
Японскими фирмами сконструированы легкие бесколлекторные электродвигатели постоянного тока на редкоземельных магнитах с максимальным КПД до 98% и высокоэффективные микропроцессорные системы управления. Эти низкооборотные двигатели встроены непосредственно в ступицы ведущих колес. Это дало возможность отказаться от механической трансмиссии и благодаря этому довести общий КПД привода до 96-97%. Серийно производятся мотор-колеса мощностью 200-250 Вт для легких электротранспортных средств - например, для электровелосипедов, которые уже появляются на дорогах мира.
Преимущества применения мотор-колес на транспортных средствах:
· компоновка автомобиля улучшается благодаря достаточно свободному выбору места установки мотор-колеса относительно других агрегатов автомобиля;
· общая масса агрегатов электропривода (не только мотор-колес) снижается по сравнению с массой агрегатов гидромеханического привода;
· желаемое распределение массы автомобиля по осям получается вследствие возможности варьировать базой автомобиля;
· число деталей и узлов механической передачи, подверженных интенсивному износу в эксплуатации, сокращается, что повышает надежность системы в целом;
· возможность реализации одним мотор-колесом большой мощности, что позволяет повысить грузоподъемность автомобиля без увеличения числа ведущих колес;
· возможность бесступенчатого или в крайнем случае двухступенчатого регулирования силы тяги;
· торможение на затяжных уклонах большой величины высокоэффективно и надежно благодаря использования электрического тормоза
Управление машиной осуществляется рукояткой типа "джойстик", установленной между креслами водителя и пассажира. На рукоятке также находятся кнопки включения фары, поворотов, сигнала и др. Управление осуществляется изменением передаточного числа вариатора. При наклоне рукоятки "вперед-назад" и "влево- вправо" происходит соответственно торможение-разгон и повороты машины. При максимальном отклонении рукоятки "вперед" может происходить срабатывание дополнительного тормозного захвата заднего колеса.
Панель управления имеет небольшие габариты, цифровую индикацию на светодиодах и может быть размещена в любом удобном месте, например на зеркале заднего вида в центре машины. Вместо индикации можно применить синтезатор речи.
Индицировать можно:
1. Скорость движения машины;
2. Повороты (можно заменить огнями на зеркалах заднего вида);
3. Положение дверей (люков) и багажников (открыты или закрыты).
В монокаре ручку управления и панель приборов лучше убрать в сторону. Так как перед водителем и пассажиром больше не существует травмирующего препятствия, то возможно применение векторной системы безопасности. В такой системе кресло обладает возможностью в случае лобового столкновения откатываться вперед, в свободную зону с одновременным наклоном назад. После удара кресло на амортизаторах возвращается в исходное положение. Такая система более надежна, чем ремни и подушки безопасности. При особенно сильных ударах возможно даже применить катапультирование кресла через лобовое стекло до полного погашения инерции удара.
Боковые удары для машины с работающим маховиком безопасны, поскольку не смогут привести к опрокидыванию. Машина, подобно маятнику, только качнется вокруг вертикальной оси. А при движении по обочине или косогору машина все равно будет сохранять вертикальное положение кузова. Если при очень крутом боковом наклоне обычная машина опрокинется, монокар будет только скользить вниз по склону, сохраняя вертикальное положение.
При равномерном движении кресло находится в вертикальном положении. При резком торможении кресло откатывается по направляющим вперед, одновременно поворачиваясь в горизонтальное положение. При этом угол наклона кресла зависит от силы торможения и при снижении этой силы кресло возвращается в исходное положение.
В машине можно предусмотреть несколько способов торможения:
Кинетическое. Основной способ. Это когда кинетическая энергия машины превращается в кинетическую энергию маховика.
Электродинамическое. Электроэнергию с мотор-колес можно гасить на балластном сопротивлении. Например, направить на электроотопитель.
Дифференциальное. Если переднее мотор-колесо включить в противофазе с задним, то оно станет вращаться в противоположном направлении вплоть до полной остановки машины и переднего колеса.
Шаговое. Мотор-колесо является шаговым электродвигателем. Можно задать частоту вращения магнитного поля ротора сколь угодно низкой влоть до нуля. Это фактически будет являться остановкой ротора.
Фрикционное. Если между ротором и статором помесить фрикционную прокладку, и подвесить ротор в магнитном поле или на воздушной подушке (газовый подшипник), то при выключении подшипника ротор всей массой машины ляжет на статор. Это аналог обычных дискового или барабанного тормоза.
Механическое. Если изменить высоту подвески, то машина может лечь на днище и тормозить выступающими частями кузова. Таким способом можно затормозить даже на льду.
Фара
находиться под колпаком переднего колеса. Она может опускаться в нишу из
переднего багажника. Фара может также поворачиваться в горизонтальной плоскости
на 360°, обеспечивая освещение при
поворотах и движении задним ходом.
Фара сделана в виде цилиндра, в центре оптической оси которого находиться
источник света. Часть цилиндра сделана прозрачной, остальная часть покрыта
отражающим слоем. В задней части может быть установлен красный светофильтр,
который при повороте фары при движении назад будет светить вперед, выполняя
функции стоп-сигнала.
В машине используется зависимая тросовая система подвески и компенсирующий амортизатор. Передняя и задняя подвески соединены тросом таким образом, что нагрузка на переднее колесо, отклоняющая колесо вверх компенсируется отклонением заднего колеса вниз и наоборот. В качестве амортизирующей силы используется половина веса машины. Изменением длины троса можно регулировать высоту машины вплоть до опускания на днище на стоянке или в режиме экстренного торможения.
Технические характеристики монокара:
Длина - 4000 мм.
Ширина - 1500 мм.
Высота - 1500 мм.
База - 3000 мм.
Клиренс - 350 мм.
Количество мест - 3 чел.
Количество дверей кузова - 2.
Грузоподъемность - 200-250 кг.
Привод -вероятно, полный.
Подвеска - зависимая.
Низкий расход топлива (не более 1л. на 100км.).
Пониженный уровень выхлопов СО2 и CN.
Малый вес (не более 400 кг).
Простота и надежность конструкции.
Простота в управлении и обслуживании.
Высокая маневренность (радиус разворота около 4 м).
Низкий коэффициент аэродинамического сопротивления.
Низкая стоимость
5.Беспилотные самолеты
"Беспилотники" различаются по массе (от аппаратов весом в полкилограмма, сравнимых с авиамоделью, до 10-15-тонных гигантов), высоте и продолжительности полета. Беспилотные летательные аппараты массой до 5 кг (класс "микро") могут взлетать с любой самой маленькой площадки и даже с руки, поднимаются на высоту 1-2 километра и находятся в воздухе не более часа. Как самолеты-разведчики их используют, например, для обнаружения в лесу или в горах военной техники и террористов. "Беспилотники" класса "микро" массой всего 300-500 граммов, образно говоря, могут заглянуть в окно, поэтому их удобно использовать в городских условиях.
За "микро" идут беспилотные летательные аппараты класса "мини" массой до 150 кг. Они работают на высоте до 3-5 км, продолжительность полета составляет 3-5 часов. Следующий класс - "миди". Это более тяжелые многоцелевые аппараты массой от 200 до 1000 кг. Высота полета достигает 5-6 км, продолжительность - 10-20 часов.
И, наконец, "макси" - аппараты массой от 1000 кг до 8-10 т. Их потолок - 20 км, продолжительность полета - более 24 часов. Вероятно, вскоре появятся машины класса "супермакси". Можно предположить, что их вес превысит 15 тонн. Такие "тяжеловозы" будут нести на борту огромное количество аппаратуры различного назначения и смогут выполнять самый широкий круг задач.
Если вспомнить историю беспилотных летательных аппаратов, то впервые они появились в середине 1930-х годов. Это были дистанционно управляемые воздушные мишени, используемые на учебных стрельбах. После Второй мировой войны, точнее, уже в 1950-х годах, авиаконструкторы создали беспилотные самолеты-разведчики. Еще 20 лет понадобилось на то, чтобы разработать машины ударного назначения. В 1970-х - 1980-х годах этой тематикой занимались конструкторские бюро П. О. Сухого, А. Н. Туполева, В. М. Мясищева, А. С. Яковлева, Н. И. Камова. Из туполевского КБ вышли беспилотные разведчики "Ястреб", "Стриж" и находящийся на вооружении и сегодня - "Рейс", а также ударный "Коршун, созданный совместно с НИИ "Кулон". Достаточно успешно занималось беспилотными самолетами КБ Яковлева, где разрабатывались аппараты "мини"-класса. Наиболее удачным из них стал комплекс "Пчела", который до сих пор стоит на вооружении.
В 1970-х годах в СССР были развернуты научно-исследовательские работы по созданию беспилотных самолетов с большой высотой и продолжительностью полета. Ими занималось ОКБ В. М. Мясищева, где разрабатывали машину "макси"-класса "Орел". Тогда дело дошло только до макета, но почти через 10 лет работы возобновили. Предполагалось, что модернизированный аппарат сможет летать на высоте до 20 км и находиться в воздухе 24 часа. Но тут наступил реформенный кризис, и в начале 1990-х годов программу "Орел" из-за отсутствия финансирования закрыли. Примерно в то же время и по тем же причинам были свернуты работы над беспилотным летательным аппаратом "Ромб". Этот уникальный по своей конструкции самолет, созданный совместно с "НИИ ДАР" при участии разработчика радиолокационной системы "Резонанс" Главного конструктора Э. И. Шустова, представлял собой разрезной биплан из четырех крыльев, составленных в виде ромба, в которые монтировались крупногабаритные антенны, обслуживающие радиолокационную станцию. Масса его была порядка 12 тонн, а полезная нагрузка достигала 1,5 тонны.
После первой волны разработок "беспилотников" в 1970-х - 1980-х годах наступило длительное затишье. Армию оснащали дорогостоящими пилотируемыми самолетами. Под них выделяли большие средства. Этим и определялся выбор тематики разработок. Правда, все эти годы "беспилотниками" активно занималось Казанское опытно-конструкторское бюро "Сокол". ОКБ "Сокол" стало, по существу, специализированным предприятием по производству беспилотных авиационных систем. Основное направление - беспилотные воздушные мишени, на которых отрабатываются боевые действия различных военных комплексов и наземных служб, в том числе и комплексов ПВО.
Сегодня беспилотные летательные аппараты "мини"- и "миди"-класса представлены достаточно широко. Их производство под силу многим странам, поскольку с этой задачей могут справиться небольшие лаборатории или институты. Что же касается аппаратов класса "макси", то для их создания нужны ресурсы целого авиастроительного комплекса.
В чем же преимущества беспилотных летательных аппаратов? Во-первых, они в среднем на порядок дешевле пилотируемых самолетов, которые нужно оснащать системами жизнеобеспечения, защиты, кондиционирования… Нужно, наконец, готовить пилотов, а это стоит больших денег. В итоге получается, что отсутствие экипажа на борту существенно снижает затраты на выполнение того или иного задания.
Во-вторых, легкие (по сравнению с пилотируемыми самолетами) беспилотные летательные аппараты потребляют меньше топлива. Представляется, что для них открывается более реальная перспектива и при возможном переходе на криогенное топливо.
В-третьих, в отличие от пилотируемых самолетов, машинам без пилота не нужны аэродромы с бетонным покрытием. Достаточно построить грунтовую взлетно-посадочную полосу длиной всего 600 метров. ("Беспилотники" взлетают с помощью катапульты, а приземляются "по-самолетному", как истребители на авианосцах.) Это очень серьезный аргумент, поскольку 70% аэродромов в Украине нуждаются в реконструкции, а темпы ремонта сегодня - один аэродром в год.
Основной критерий выбора типа летательных аппаратов - стоимость. Благодаря стремительному развитию вычислительной техники существенно подешевела "начинка" - бортовые компьютеры "беспилотников". На первых аппаратах использовались тяжелые и громоздкие аналоговые вычислительные машины. С внедрением современной цифровой техники их "мозг" стал не только дешевле, но и умнее, компактнее и легче. Это означает, что аппаратуры на борт можно взять больше, а ведь именно от нее зависят функциональные возможности беспилотных самолетов.
Если же говорить о военном аспекте, то беспилотные летательные аппараты находят применение там, где в разведывательной операции или воздушном бою можно обойтись без пилота. На IХ международной конференции по "беспилотникам", прошедшей в 2001 году во Франции, прозвучала мысль о том, что в 2010-2015 годах боевые операции сведутся к войне автоматизи рованных систем, то есть к противоборству роботов.
Специалисты "ОКБ Сухого" проанализировали развитие существующих в мире научно-технических программ по созданию "беспилотников" и обнаружили стойкую тенденцию к увеличению их размеров и массы, а также высоты и продолжительности полета. Аппараты с большим весом могут дольше находиться в воздухе, выше подниматься и дальше "видеть". "Макси" берут на борт более 500 кг полезной нагрузки, которая позволяет решать задачи большого объема и с лучшим качеством.
Анализ показал, что беспилотные самолеты класса "макси" и "супермакси" сегодня востребованы как никогда. Судя по всему, они могут изменить расклад сил на мировом рынке летательных аппаратов. Пока эта ниша освоена только американскими конструкторами, которые начали работать над "беспилотниками" "макси"-класса на 10 лет раньше нас и успели создать несколько очень хороших самолетов. Наиболее популярный из них "Глобал Хоук" (рис.5.1): он поднимается на высоту до 20 км, весит 11,5 тонны, имеет продолжительность крейсерского полета более 24 часов. Конструкторы этой машины отказались от поршневых моторов и оснастили ее двумя турбореактивными двигателями. Именно после показа "Глобал Хоука" на авиасалоне в Ле-Бурже в 2001 году на Западе началась борьба за захват нового сектора рынка.

Рисунок 5.1. .Американский беспилотный самолет "макси"-класса «Глобал Хоук»
Еще во время создания первых беспилотных самолетов "макси"-класса "Орел" и "Ромб" была разработана концепция, согласно которой начали строить беспилотные аппараты, обеспечивающие наилучшие условия для размещения в них полезной нагрузки. На "Ромбе", например, смогли совместить большие антенные блоки размером 15-20 м с элементами самолета. Получилась "летающая антенна". Сегодня создается, по сути, летающуя платформа для аппаратуры наблюдения. Соединив полезную нагрузку с бортовыми системами, можно получить полноценный интегрированный комплекс, максимально оснащенный радиоэлектронным оборудованием (рис.5.2). Это будет качественно новый вид авиационной техники - стратосферная платформа для решения задач, которые либо не по силам низко-, средневысотным пилотируемым и беспилотным машинам, либо требуют неоправданно больших затрат при выполнении их спутниковыми группировками.

Рисунок 5.2. Многоцелевой беспилотный летательный аппарат "Протеус" производства США
Весь мир уже осознал, какую пользу и экономию могут принести беспилотные летательные аппараты не только в военной, но и в гражданской сфере. Их возможности во многом зависят от такого параметра, как высота полета. Сегодня предел составляет 20 км, а в перспективе и до 30 км. На такой высоте беспилотный самолет может конкурировать со спутником. Отслеживая все, что происходит на территории площадью около миллиона квадратных километров, он сам становится своего рода "аэродинамическим спутником". Беспилотные самолеты могут взять на себя функции спутниковой группировки и выполнять их в режиме реального времени в рамках целого региона.
Чтобы из космоса вести фото- и киносъемку или наблюдать за каким-нибудь объектом, нужны 24 спутника, но и тогда информация от них будет поступать один раз в час. Дело в том, что спутник находится над объектом наблюдения всего 15-20 минут, а затем уходит из зоны его видимости и возвращается на то же место, совершив оборот вокруг Земли. Объект же за это время уходит из заданной точки, поскольку Земля вращается, и снова оказывается в ней только через 24 часа. В отличие от спутника, беспилотный самолет сопровождает точку наблюдения постоянно. Проработав на высоте около 20 км более 24 часов, он возвращается на базу, а ему на смену в небо уходит другой. Еще одна машина находится в резерве. Это огромная экономия, поскольку беспилотные самолеты на порядок дешевле спутников.
Беспилотные самолеты могут конкурировать со спутниками и в сфере создания телекоммуникационных сетей и навигационных систем.
На "беспилотники" можно возложить непрерывное круглосуточное наблюдение за поверхностью Земли в широком диапазоне частот. Используя их, можно создать информационное поле страны, охватывающее контроль и управление движением воздушного и водного транспорта, поскольку эти машины в состоянии взять на себя функции наземных, воздушных и спутниковых локаторов (совместная информация от них дает полную картину того, что делается в небе, на воде и на земле).
Беспилотные летательные аппараты помогут решить целый спектр научных и прикладных задач, связанных с геологией, экологией, метеорологией, зоологией, сельским хозяйством, с изучением климата, поиском полезных ископаемых… Они будут следить за миграцией птиц, млекопитающих, косяков рыбы, изменением метеоусловий и ледовой обстановки на реках, за движением судов, перемещением транспорта и людей, вести аэро-, фото- и киносъемку, радиолокационную и радиационную разведку, многоспектральный мониторинг поверхности, проникая вглубь до 100 метров.
Потребность мирового рынка в беспилотных авиационных системах с большой высотой и продолжительностью полета представлена в виде диаграммы на рис. 5.3.
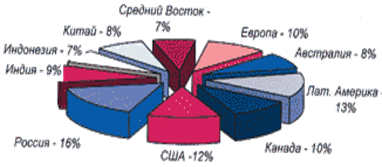
Рисунок 5.3. Потребности мирового рынка в беспилотных авиационных системах с большой высотой и продолжительностью полета.
Сферы применения гражданского беспилотного самолета
ОБНАРУЖЕНИЕ МАЛОРАЗМЕРНЫХ ОБЪЕКТОВ:
· воздушных
· надводных
· наземных
УПРАВЛЕНИЕ ВОЗДУШНЫМ ДВИЖЕНИЕМ:
· в труднодоступных районах
· при стихийных бедствиях и авариях
· на временных воздушных трассах в авиации народного хозяйства
КОНТРОЛЬ МОРСКОГО СУДОХОДСТВА:
· поиск и обнаружение судов
· предупреждение аварийных ситуаций в портах
· контроль морских границ
· контроль правил рыболовства
РАЗВИТИЕ РЕГИОНАЛЬНЫХ И МЕЖРЕГИОНАЛЬНЫХ ТЕЛЕКОММУНИКАЦИОННЫХ СЕТЕЙ:
· системы связи, в том числе мобильные
· телерадиовещание
· ретрансляция
· навигационные системы
АЭРОФОТОСЪЕМКА И КОНТРОЛЬ ЗЕМНОЙ ПОВЕРХНОСТИ:
· аэрофотосъемка (картография)
· инспекция соблюдения договорных обязательств
· (режим «открытого неба»)
· контроль гидро-, метеообстановки
· контроль активно излучающих объектов контроль ЛЭП
КОНТРОЛЬ ЭКОЛОГИЧЕСКОЙ ОБСТАНОВКИ:
· радиационный контроль
· газохимический контроль
· контроль состояния газо- и нефтепроводов
· опрос сейсмических датчиков
ОБЕСПЕЧЕНИЕ СЕЛЬХОЗРАБОТ И ГЕОЛОГОРАЗВЕДКИ:
· определение характеристик почвы
· разведка полезных ископаемых
· подповерхностное (до 100 м) зондирование Земли
ОКЕАНОЛОГИЯ:
· разведка ледовой обстановки
· слежение за волнением моря
· поиск косяков рыбы
6.Гелиотранспорт
Электромобили, солнцемобили, солнечные велосипеды, электромоторные суда с солнечными батареями - все эти экологически чистые транспортные средства появились всего лет 15-20 назад. За прошедшие годы электромобили перестали быть редкостью. Они находят все большее применение, особенно в крупных городах, перенасыщенных автотранспортом. Что касается солнцемобилей, то сегодня их можно встретить на дороге очень редко. Это очень дорогое удовольствие. Между тем становится все более популярным и доступным по цене водный гелиотранспорт - маломерные суда, приводимые в движение солнечной энергией. Более всего они подходят для водного туризма и рыбалки.
Солнцемобили в большинстве своем машины уникальные. В их конструкции используются оригинальные технические решения и новейшие материалы. Отсюда и очень высокая цена. Например, двухместный солнцемобиль "Мечта" (рис.6.1) обошелся японской автомобильной компании "Хонда" в 2 миллиона долларов. Но деньги были потрачены не напрасно. Трассу трансавстралийского ралли 1996 года протяженностью 3000 км он прошел со средней скоростью почти 90 км/ч, а на прямом скоростном участке достиг 135 км/ч. Рекорд "Мечты" до сих пор никем не побит.

Рисунок 6.1. Солнцемобиль-рекордсмен "Мечта"
Солнцемобиль - это электромобиль, снабженный фотоэлектрическими преобразователями (солнечными батареями) достаточно большой мощности, в которых энергия света преобразуется в электрический ток, питающий тяговый двигатель и заряжающий аккумуляторы.
Конструирование солнцемобилей и испытание их в гонках постепенно оформились в новый технический вид спорта - "брейнспорт". По сути дела - это состязания интеллектов создателей солнцемобилей. На них отрабатываются параметры транспортных средств будущего. Чтобы солнцемобиль с максимальной мощностью солнечных батарей и электромотора всего 1,5-2 кВт мог соперничать с автомобилем, необходимо использовать самые легкие и прочные конструкционные материалы, высокоэффективные системы электропривода, последние достижения аэродинамики, гелио- и электротехники, электроники и других наук.
Специалисты полагают, что солнечный транспорт станет всерьез конкурировать с автомобильным, когда эффективность доступных по цене солнечных элементов (фотоэлектрических преобразователей) составит 40-50%. Пока же их КПД всего 10-12%. Чтобы солнцемобили с мощностью солнечных батарей 1,5-2 кВт "догнали" автомобили с двигателями в 100 раз мощнее, необходимо использовать легкие и прочные конструкционные материалы, эффективные системы электропривода, достижения аэродинамики, гелио- и электротехники, электроники и других наук. Конструкции транспортных средств будущего и отрабатываются на ралли солнцемобилей.
У солнцемобилей достигнут минимальный для наземных экипажей коэффициент аэродинамического сопротивления (0,1). Опыт концерна "General Motors" при разработке рекордного солнцемобиля "Sunracer" ("Солнечный гонщик") (рис.6.2) использован в проектировании электромобиля "Impact" ("Удар"), серийное производство которого началось в 1996 г. Его скорость достигает 130 км/ч, до 100 км/ч он разгоняется за 9 с и на обычных свинцово-кислотных аккумуляторах проходит 100 км.

Рисунок 6.2. Солнцемобиль Sunraycer
Специально для солнцемобилей сконструированы легкие бесколлекторные двигатели постоянного тока с магнитами из редкоземельных металлов и КПД до 98%, а также эффективные микропроцессорные системы управления. В 1993 г. на трех солнцемобилях - лидерах трансавстралийских гонок впервые низкооборотные двигатели встроили непосредственно в ступицы ведущих колес. Идея мотор-колеса, сама по себе не новая, в солнцемобилях позволила отказаться от трансмиссии и довести КПД привода до 96-97%. В 1996 г. в трансавстралийском ралли участвовало уже 12 таких конструкций, а компания "Honda", вдохновленная успехом своей "Мечты", приступила к серийному выпуску электровелосипедов с мотор-колесом. Известные производители шин - "Michelin", "Bridgestone", "Dunlop" - разрабатывают новые материалы и протекторы для покрышек солнцемобилей. Уже созданы шины, которые при хорошем сцеплении с дорогой обладают самым низким коэффициентом сопротивления качению - всего 0,007. Фирма "Michelin" производит подобные энергосберегающие шины и для серийных автомобилей.
Солнечные батареи небольшой мощности на обычных автомобилях кондиционируют воздух в салонах и подзаряжают пусковые аккумуляторы на стоянках, питают радио- и телеаппаратуру.
Однако существует гелиотранспорт, который, весьма вероятно, станет популярным и доступным в самое ближайшее время. Речь идет о маломерных судах, лодках, катерах, катамаранах, яхтах и других водных транспортных средствах, приводимых в движение солнечной энергией. Именно на воде задолго до появления электромобиля было испытано первое транспортное средство с электрическим приводом. В 1833 году лодка с двумя электромоторами и 27 гальваническими батареями поднялась по Неве на несколько километров. Принадлежала она работавшему в Петербурге немецкому инженеру Морицу Якоби. Но из-за низкой энергоемкости батарей эксперименты пришлось прекратить.
В начале ХХ века появились маломерные суда с двигателями внутреннего сгорания. Энергоемкость углеводородного топлива была значительно выше той, что могли дать гальванические батареи. Лодки и катера с мощными бензиновыми моторами очень быстро получили самое широкое распространение. А электромоторные суда и их сухопутные "братья" - электромобили - из-за ограниченного ресурса аккумуляторных батарей и сложности их зарядки до недавнего времени оставались исключительной редкостью.
Сегодня суда с бензиновыми моторами есть практически на каждом водоеме. Они отравляют воду и воздух, своим ревом, выхлопными газами, вызывающей эрозию берегов сильной волной нарушают условия жизни обитателей рек, озер и морей. Дело дошло до того, что приходится ограничивать, а кое-где запрещать движение моторных лодок. Так что у электромоторных судов с солнечными батареями появился шанс стать им реальной альтернативой. Экологически чистые "солнечные" суда лучше других подходят для активного отдыха, спорта, рыбалки и туризма.
Превратить в "солнечный" транспорт водное судно гораздо проще, чем машину: на палубе катера или лодки намного больше места для размещения солнечных батарей, чем в кузове автомобиля. Есть и другие плюсы. На открытых водоемах фотоэлектрические преобразователи не затеняются ни деревьями, ни домами, ни машинами и поэтому отдают больше энергии. Водному транспорту не приходится преодолевать затяжные подъемы и спуски, стремительно разгоняться и тормозить на светофорах, а значит, им нужно меньше энергии.
На всех транспортных средствах с солнечным приводом есть аккумуляторы. Их емкость и вес зависят от назначения судна. На катерах или лодках для воскресных прогулок они могут быть небольшими. Если "солнечной" лодкой пользоваться только по выходным, аккумуляторы можно заряжать в рабочие дни, причем солнечные батареи для зарядки аккумуляторов стоит размещать не на самой лодке, а на стационарной береговой гелиостанции.
В коротком плавании можно обойтись и без аккумуляторов. Но тогда на случай непогоды нужно иметь на борту резервный движитель: весла, педали или парус. Роль паруса могут играть солнечные панели. Из них получается и навес, который защитит от солнца и дождя.
В отличие от ДВС современные лодочные электромоторы практически не требуют ухода. Не нужно держать на судне емкости для топлива и смазочных масел и менять масло в двигателе.
Первое электромоторное судно, приводимое в движение солнечной энергией, построил в 1975 году англичанин Алан Фримен. Его электрокатамаран развивал скорость до 5 км/ч. В наши дни, всего через четверть века, скорость электролодок с солнечными панелями возросла более чем вдвое, и их можно купить в магазинах спорттоваров, например, в Германии, Швейцарии и других странах.
Электромоторные суда на солнечных батареях не раз проходили испытания в длительных морских путешествиях. В 1985 году японский яхтсмен Кеничи Хори на "солнечном" катере "Сикрикерк" в одиночку пересек Тихий океан. За 75 суток он преодолел 8700 морских миль. Скорость 3-5 узлов, с которой "Сикрикерк" шел от Гавайских островов до острова Бонин вблизи западного побережья США, была близка к средней скорости 9-метровой крейсерской парусной яхты.
У "солнечного" судна есть немало преимуществ перед парусным: плавание на нем гораздо меньше зависит от капризов погоды, удобно и то, что можно пользоваться электрическими средствами связи и бытовыми приборами. Например, на катере Кеничи Хори работали холодильник, СВЧ-печь, телевизор и видеокамера, спутниковая навигационная система, радиолокатор, метеорологические приборы и бортовой компьютер. Путешественник взял с собой в одиночное плавание даже малогабаритную стиральную машину. Энергию для работы этих приборов вырабатывали солнечные панели площадью 9 м2 и общей мощностью 1100 Вт. Из них 500 Вт использовалось днем для работы гребного винта электродвигателя мощностью 0,33 кВт, 400 Вт - для зарядки аккумуляторной батареи, питающей двигатель ночью, 200 Вт - для бытовых нужд и работы радиостанции. Облегченные солнечные модули жестко крепились на крыше рубки и палубе "Сикрикерка". Тяжелые аккумуляторы располагались в трюмной части корпуса и служили балластом.
Экологически чистые транспортные средства, как наземные, так и водные, были представлены в международном экотуре "Финляндия-2000". Большой интерес специалистов и зрителей вызывала финская "солнечная" яхта "Сольвейг" с палубой, облицованной ярко-синими фотоэлектрическими модулями. Установленный на ней электромотор мощностью 1,5 кВт позволяет в солнечную погоду развивать скорость до 5 узлов. Шесть аккумуляторов емкостью по 125 А·ч, помещенные внутрь киля, повышают устойчивость судна. В просторной каюте достаточно места для длительного путешествия команды из четырех-пяти человек. Навигационные приборы, СВЧ-печь, холодильник, как и электромотор, получают энергию от солнечных батарей. Складывающаяся, чтобы свободно проходить под низкими мостами, мачта приспособлена для паруса.
В экотуре "Финляндия-2000" участвовала еще одна "солнечная" яхта изобретате ля Йорма Панкала, названная "Атон" (по имени древнеегипетского бога Солнца). Легкое судно, изготовленное из стеклопластика, по форме напоминает маленький авианосец. На его просторной палубе достаточно места для размещения солнечных панелей суммарной мощностью 1200 Вт. На "Атоне" нет мачты, но Й. Панкала намеревается оборудовать судно ветроэлектрогенератором на телескопической стойке и парусом в виде воздушного змея. На мелководье, где нельзя пользоваться гребным винтом, пропеллер реверсивного электрогенератора будет работать как воздушный движитель.
В днище яхты есть стеклянный иллюминатор. Его можно открыть и облиться морской водой. Осадка судна всего 25 см, поэтому невысокого бортика вокруг иллюминатора вполне достаточно, чтобы избежать затопления судна.
Экотур "Финляндия-2000" убедил всех, что "солнечные" лодки, катера и яхты пригодны для плавания даже в такой северной стране, как Финляндия, - летом там солнечных дней не намного меньше чем на юге. Они могут быть совершенно автономными даже в длительном плавании и подходят как для малых рек и озер, так и для открытых морей.
Фотоэлектрические преобразователи энергии, химические источники тока и системы электропривода, используемые на "солнечных" судах, становятся все более эффективными. Они занимают совсем немного места, поэтому даже на небольших "семейных" яхтах можно разместить разнообразное дополнительное оборудование - от биотуалета до малогабаритной сауны. Это особенно привлекает привыкших к благам цивилизации путешественников. "Солнечные" суда почти бесшумны. На них разговаривают, не повышая голоса, слушают пение птиц, плеск волн и шум ветра, дышат свежим воздухом. Воспользоваться таким транспортом захочет каждый, кто любит совершать водные путешествия.
7. Монорельсовые дороги
Монорельсовые дороги были предложены почти 180 лет назад. Первая русская монорельсовая дорога с конной тягой была сооружена у села Мячково в 1820 г. В основном для перевозки леса. Действующую электрическую модель подобной дороги построил в Петербурге инженер И.В.Романов в 1897 г.
Современная монорельсовая дорога – это железобетонная или металлическая балка (рельс), поднятая на эстакаду, и подвижной состав (вагоны) на тележках с пневматическими шинами. Различают навесные дороги, где вагоны имеют нижнюю точку опоры и как бы сидят верхом на несущей балке, и подвесные системы, где вагоны подвешиваются к тележкам, опирающимся на балку. Каждый из названных типов дорог имеет свои преимущества и недостатки. Навесная дорога требует более сложной системы ходовых частей для обеспечения устойчивости вагонов. Кроме того, в неблагоприятных метеоусловиях монорельс (балка) покрывается льдом или снегом и практически выводит систему из строя или требует трудоемкой работы по ее очистке. Наряду с этим данный тип дороги позволяет иметь значительно (на 2-3 м) меньшую высоту опор эстакады и, следовательно, меньшую строительную стоимость (рис.7.1). Для подвесных дорог необходимы, наоборот, более высокие опоры, чтобы обеспечить надлежащий подъем пола (дна) кузова вагона над поверхностью земли (4,0-5,0 м), но ходовые части вагонов существенно упрощаются.

Рисунок 7.1. Внешний вид монорельсовой навесной дороги
Действующие ныне монорельсовые дороги имеют в основном электрическую тягу, получая энергию от контактного провода. Они малошумны и не загрязняют воздушного бассейна. Поезд монорельсовой дороги, как и поезд метрополитена, может состоять из одного или нескольких вагонов. Максимальная скорость движения на действующих дорогах составляет 70-125 км/ч, провозная способность – до 40 тыс. пасс/ч. Стоимость сооружения монорельсовых дорог примерно в 2 раза ниже стоимости подземного метрополитена. При наличии свободных пространств для установки эстакады они признаются эффективными в качестве средств городского и пригородного транспорта, а также в сильно пересеченной и горной местности.
В восьмидесятых годах учеными Физико - энергетического института АН Латвийской ССР был создан весьма оригинальный проект монорельса на магнитной подушке для перевозок со скоростью 500 километров в час.
Вагон предполагалось создать на базе уже проверенного в эксплуатации фюзеляжа транспортного самолета Ил-18 (рис.7.2). Длина такого вагона, по проекту вмещавшего 100 пассажиров, составляла 36 метров, ширина 3,5 метра, высота 3, 85 метра, а масса - 40 тонн. Под полом вагона размещались криостаты со сверхпроводящими магнитами, которые соединялись с кузовом через рессорное подвешивание (т.к. при скорости 500 километров в час возмущения от пути невозможно гасить только за счет зазора в магнитной подвеске, принятого равным 22 миллиметра). Преобразователи частоты управлялись бортовым компьютером.

Рисунок 7.2 Монорельс на магнитной подушке
Во время стоянки и перемещения в депо и на экипировочные участки вагон должен был двигаться на колесах по рельсам с колеей 3 метра, при движении на перегоне колеса убирались. На эти колеса экипаж также должен был "приземляться" при аварии системы магнитной подвески.
Была построена экспериментальная модель с вагоном массой 3,2 килограмма. В 90-е годы сведений о продолжении работ по данному проекту не поступало.
Несмотря на кажущуюся внешнюю простоту, монорельсовый путь и сложен в устройстве, и трудоемок в постройке. Несущая балка (собственно монорельс) на навесных дорогах изготавливается из монолитного или сборного железобетона, а на всех подвесных - из высокопрочной стали. Этот элемент конструкции должен выдерживать очень большие нагрузки во время разгона и торможения поездов, а также при прохождении поездами криволинейных участков пути. Таковые, в частности, для компенсации центробежных сил, изогнуты в двух плоскостях, что приводит к удорожанию всей постройки. Например, для строительства пути монорельсовой дороги в Диснейленде пришлось заказывать сложную сборную опалубку, состоящую из пятидесяти элементов. Кроме того, монорельсовые дороги сложны в обслуживании пути и подвижного состава, а также требуют подъема пассажиров на эстакаду и спуска с нее.
Указанные недостатки привели к тому, что мире на данный момент построено несколько десятков отдельных линий монорельсовых дорог протяженностью от сотен метров до нескольких километров главным образом в качестве аттракционов в парках, на выставках и т.п.
Вместе с тем монорельсовые дороги могут иметь свою экономически целесообразную сферу применения как полноценный вид городского и междугороднего транспорта.
8.Моторвагонные поезда
Начальный этап развития железных дорог характеризовался использованием пассажирских поездов исключительно на локомотивной тяге. С широким распространением электрической тяги появилась альтернатива этому решению в виде поезда, в котором тяговая мощность распределена по всей его длине. До сих пор в этом отношении не определилась единая тенденция, хотя в пригородных пассажирских перевозках практически везде используется принцип распределенной тяги.
На линиях облегченных городских железных дорог и трамвая гибкая и хорошо зарекомендовавшая себя концепция «моторный вагон + прицепной вагон» в конце 1950-х годов из-за больших расходов на персонал была заменена более современной, предусматривающей использование моторвагонных поездов из сочлененных вагонов с общим салоном.
На метрополитене и городских железных дорогах (S-Bahn), имеющих выход на магистральные линии, относительно высокая скорость движения и короткие расстояния между остановками требуют применения поездов с большим числом моторных осей. Еще в 1970 г. при разработке электропоезда серии 420 для городской железной дороги Мюнхена исходили из максимальной мощности системы тягового электроснабжения. Девятивагонный поезд с приводом на все оси имеет мощность продолжительного режима 7,6 МВт, развивает максимальную скорость 120 км/ч и ускорение при разгоне 1 м/с2.
Для пригородных и региональных пассажирских перевозок используют поезда на локомотивной тяге. Депо, осуществляющие техническое обслуживание пассажирских вагонов и локомотивов, были исторически разделены в системе железных дорог. Поезда на локомотивной тяге позволяли гибко реагировать на изменения пассажиропотока путем увеличения или уменьшения числа вагонов. К сожалению, станции многих больших городов являются тупиковыми на ответвлениях от магистральных линий. С введением уплотненных графиков движения время стоянки поездов S-Bahn и региональных необходимо было сокращать из-за недостаточной пропускной способности станций. Все указанные факторы говорили о том, что вместо смены локомотивов речь могла идти только об использовании челночных поездов с локомотивом в одном конце и вагоном с кабиной управления в другом. В качестве альтернативного варианта могут рассматриваться моторвагонные поезда.
В состав пассажирских поездов дальнего сообщения долгое время включались беспересадочные вагоны, которые на маршрутах большой протяженности, в том числе и международных, входили в состав разных поездов. В период развития системы междугородных поездов InterCity (IC) беспересадочные вагоны в международных сообщениях заменили поезда EuroCity (EC). Здесь для электроподвижного состава серьезным препятствием стали места стыкования разных систем тягового тока, а для поездов с тяговым приводом любого типа — различие систем СЦБ.
После того как на границах между европейскими странами были отменены остановки для паспортного и таможенного контроля, смена локомотивов стала тормозом для повышения маршрутной скорости поездов. Современная силовая электроника позволяет с допустимыми расходами строить многосистемные электровозы и электропоезда. Примером могут служить поезда Thalys Национального общества железных дорог Франции (SNCF) с концевыми моторными вагонами (рис.8.1) и ICE3 железных дорог Германии (DBAG) с распределенной тягой (рис.8.2).

Рисунок 8.1. Высокоскоростной поезд Thalys с концевыми моторными вагонами

Рисунок 8.2. Поезд ICE3 с распределенной тягой
Из-за большого числа тупиковых станций в Германии DBAG широко используют в междугородных сообщениях челночные поезда. Логичным шагом был бы переход от них к моторвагонным поездам с организацией технического обслуживания по системе, принятой для высокоскоростных поездов ICE.
Высокоскоростные новые линии с мощными и комфортабельными поездами оправдывают себя только в том случае, если капитальные и эксплуатационные затраты находятся в разумном соотношении с доходами. Анализ затрат жизненного цикла (LCC) показывает, что расходы на техническое обслуживание и ремонт подвижного состава (включая финансовые потери от простоя во время ремонта) являются важной статьей LCC.
Традиционная концепция раздельного технического обслуживания тягового подвижного состава и пассажирских вагонов с разными интервалами проведения профилактических и ремонтных работ оказывается несостоятельной при расчетах соотношения между LCC и экономической эффективностью. В связи с этим в Гамбурге, Мюнхене и Берлине для технического обслуживания поездов ICE были построены специализированные депо, в которых внедрена автоматическая система диагностики. Благодаря этому поезда ICE имеют годовой пробег 550 тыс. км, в то время как для традиционных поездов на локомотивной тяге он составляет 300 тыс. км.
В этих депо обслуживают поезда с концевыми моторными вагонами (ICE1, ICE2) и поезда с распределенной тягой (ICE3, ICE-T). Длина ремонтного цеха составляет 400 м, что соответствует максимальной длине поезда и стандартной в Европе длине платформы.
Коммерческим аргументом в пользу применения моторвагонных поездов с распределенной тягой является увеличенная полезная длина. Если бы поезд ICE3 длиной 200 м и мощностью 8 МВт не был с распределенной тягой, ему потребовалось бы два моторных вагона по концам. При этом полезная длина уменьшилась бы на 30 м (15 %), что означает потерю полезной длины пассажирской платформы и уменьшение числа продаваемых пассажирских мест. Даже при одном моторном вагоне в головной части и ограничении максимальной мощности поезда 6 МВт была бы значительная потеря пассажирских мест по сравнению с моторвагонным той же длины.
Поезд длиной 200 м, ведомый локомотивом и составленный из двухэтажных вагонов, по самым приближенным расчетам на 10 % дороже в изготовлении, чем поезд такой же длины из обычных вагонов. При этом число мест для сидения больше на 20 %, чем в обычном поезде.
На Тайване, например, потребовалось при коротких пассажирских платформах максимально увеличить число мест в поезде. В европейском варианте (Alstom/Siemens) эту проблему предлагалось решить путем использования двухэтажных поездов с концевыми моторными вагонами, в японском — за счет моторвагонных поездов с вагонами увеличенной ширины (пять мест в ряду). Вариант двухэтажных поездов с распределенной тягой и еще бóльшим числом мест был признан нереальным из-за дефицита свободного пространства под кузовами вагонов для размещения оборудования.
К недостаткам двухэтажных поездов в высокоскоростном движении следует отнести:
· увеличенную нагрузку на ось;
· большой объем вытесняемого воздуха при движении в тоннелях;
· увеличенную боковую поверхность, воспринимающую ветровую нагрузку.
В высокоскоростном движении наметилась тенденция к использованию моторвагонных поездов. При разработке ICE3 руководствовались теми же соображениями, что и в начале 1970-х годов, когда создавался моторвагонный электропоезд серии 403: высокая скорость и соответствующая ей аэродинамика, повышенная мощность при хорошем сцеплении за счет большого числа моторных осей, комфортность.
Япония с самого начала разработки системы Синкансен ориентировалась на поезда с распределенной тягой, в то время как во Франции предпочтение отдали поездам TGV с концевыми моторными вагонами. Однако там тоже ведутся работы над высокоскоростным моторвагонным поездом AGV.
В дизель-поездах большим недостатком является вибрация, передаваемая кузову от дизеля. К этому добавляется шум вентиляторов, которые охлаждают тяговые преобразователи, размещенные, как и дизель, под кузовом.
Для эксплуатационных служб поездá на локомотивной тяге более удобны с точки зрения изменения составности в зависимости от колебаний пассажиропотока. В них пассажиры в поисках свободного места могут беспрепятственно проходить через весь состав, что невозможно в моторвагонных поездах, составленных из двух и более секций.
Для моторвагонных поездов и челночных, имеющих концевой вагон с кабиной управления, большое значение имеют поперечные ветровые нагрузки, величина которых при повышенной скорости и малой массе поезда становится опасной. В наибольшей степени ветровым нагрузкам подвержены японские поезда Синкансен, имеющие осевую нагрузку 12 т. Стесненные габариты тоннелей на их линиях потребовали поиска аэродинамически оптимального решения лобовой части поездов. Узкий и удлиненный обтекатель облегчает прохождение тоннелей. Однако при движении на открытых участках под действием бокового ветра на нем возникает «эффект крыла», в результате которого аэродинамическая подъемная сила разгружает переднюю тележку.
В Японии при создании поездов Синкансен стремятся к максимальному облегчению конструкций. В первые годы на линиях Синкансен имели место серьезные проблемы с состоянием верхнего строения пути. Это в основном объяснялось низким качеством щебеночного балласта при большой интенсивности движения высокоскоростных поездов.
Сейчас на линиях Синкансен используется путь на жестком основании. Для уменьшения осевых нагрузок поезд серии 700, состоящий из 11 вагонов, выполнен с 36 моторными осями, причем тяговая мощность составляет лишь 275 кВт на одну ось. Эта мера, направленная на сохранение верхнего строения пути, усложняет конструкцию подвижного состава. Хотя производство больших партий моторно-редукторных блоков более выгодно, в то же время увеличивается объем монтажа, а в эксплуатации увеличиваются затраты на техническое обслуживание и увеличивается вероятность повреждений. Другой крайностью с точки зрения концепции привода для такого поезда мощностью 9,9 МВт было бы использование двух четырехосных концевых моторных вагонов, как в поезде ICE1. При этом длина поезда увеличилась бы с 280 до 310 м при одном и том же числе мест.
Приведенные аргументы еще не позволяют сделать окончательный вывод о том, какой концепции тягового привода следует отдать предпочтение. В связи с этим дается сравнение двух реальных поездов, выполняющих одинаковую работу в близких эксплуатационных условиях, имеющих одинаковый годовой пробег и сравнимые концепции технического обслуживания. Для этого использованы данные DBAG и результаты исследований консалтинговой компании DE-Consult.
Целью сравнения является выбор поезда с более высокой экономической эффективностью, для чего сравнивали расходы LCC поезда ICE2 с концевыми моторными вагонами и ICE3 с распределенной тягой. Наиболее важные для сравнения технические данные приведены в табл. 8.1.
Таблица 8.1. Технические данные сравниваемых поездов
| Параметр | Сравниваемые поезда | |
| ICE2 | ICE3 | |
| Мощность, МВт | 2 х 4,8 | 16 |
| Масса тары, т | 814 | 900 |
| Длина поезда, м | 385 | 398 |
| Полезная длина, м | 306 (80 %) | 341 (86 %) |
| Число мест для сидения без учета ресторана | 927 (28 % в первом классе) | 1124 (27 % в первом классе) |
| Шаг расположения сидений, м: | ||
| первого класса | 1,15 | |
| второго класса | 0,94 | |
| Затраты на поезд, % | 100 | 118 |
| Удельные затраты на место для сидения, % | 100 | 98 |
Стоимость поезда с распределенной тягой выше, чем с концевыми моторными вагонами. Однако из-за большего числа мест в этом поезде почти сохраняется равновесие с точки зрения затрат на одно место, так как разница в 2 % лежит в пределах полосы разброса результатов.
Для сравнения необходимо рассмотреть также и другие факторы. Затраты на приобретение подвижного состава (капитальные) составляют всего лишь около 20 % LCC. Если пренебречь расходами на утилизацию, которые потребуются через 25 или более лет, то получается, что 80 % LCC приходятся на эксплуатацию и техническое обслуживание. Результаты сравнения приведены в табл. 8.2.
Т а б л и ц а 8.2. Сравнение затрат жизненного цикла
| Параметр | Сравниваемые поезда | |
| ICE2 | ICE3 | |
| Срок службы, лет | 25 | |
| Годовой пробег, тыс. км | 550 | |
| Капитальные затраты, % LCC | 20,2 | 21,5 |
| Затраты на эксплуатацию без учета расхода энергии, % (%LCC) | 100 (47,5) | 104 (44,9) |
| Затраты на энергию, % (%LCC) | 100 (11,3) | 125 (13,5) |
| Затраты на техническое обслуживание, % (%LCC) | 100 (21) | 105 (20) |
| Общие LCC, % | 100 | 110 |
| Удельные LCC на место для сидения, % | 100 | 91 |
По предварительным расчетам, потребление электроэнергии более мощным поездом с распределенной тягой, а также расходы на его текущее содержание выше из-за большего числа тяговых двигателей и увеличенной пассажировместимости. Хотя общие LCC поезда с распределенной тягой на 10 % выше, они покрываются за счет более высоких доходов, обусловленных бóльшим числом мест. В качестве окончательного результата сравнения может служить 9 %-ный выигрыш в пользу поезда с распределенной тягой по удельным LCC на одно пассажирское место.
Несмотря на полученные расчетным путем и приведенные в таблицах результаты для поездов семейства ICE, каждый конкретный случай выбора должен рассматриваться отдельно с учетом всех местных условий и параметров, таких, как скорость движения, расстояние между остановками, топография линий, величина пассажиропотока, возможности изготовления, ремонта и текущего технического обслуживания в стране использования. Для поездов на локомотивной тяге более удобна давно сложившаяся система технического обслуживания в локомотивных и вагонных депо.
Компактный монтаж электрооборудования в локомотиве проще, чем при его распределении по всей длине под кузовами вагонов в моторвагонном поезде. Для технического обслуживания полносоставных моторвагонных поездов в депо нужны цеха большой длины. Опыт показывает, что эффективность технического обслуживания значительно выше при проведении его на комплектном поезде, чем повагонно.
Вагоны поездов ICE3 и ICE-T изготавливают в Германии разные компании, объединенные в консорциум. Формирование поездов происходит лишь на путях испытательного центра компании Siemens в Вегберг-Вильденрате.
Для поездов, используемых в дальнем сообщении, требование повышенной силы тяги при трогании (как у поездов S-Bahn) не является обязательным. Однако здесь должна быть обеспечена избыточная сила тяги при выходе на максимальную скорость или движении на подъемах до 40 ‰. Достижение необходимой силы тяги связано с проблемой использования сцепления, которое, в свою очередь, зависит от осевой нагрузки в поездах на локомотивной тяге и от числа моторных осей в моторвагонных поездах. Эти проблемы успешно решаются благодаря использованию средств современной силовой электроники и надежной защите от юза и боксования. При этом достаточной является мощность 1,4 МВт на ось локомотива (концевого моторного вагона) или 0,5 МВт на ось моторвагонного поезда.
Поезда ICE1 и ICE2 с концевыми моторными вагонами, с распределенной тягой ICE3 и ICE-T из вагонов с наклоняемыми кузовами появились в последние 10 лет. В настоящее время они представляют собой семейство поездов высокого класса, используемых в дальних сообщениях. Каждый из них имеет свою нишу на рынке транспортных услуг: ICE1 большой пассажировместимости используется на протяженных маршрутах, ICE2 на более коротких, ICE3 там, где требуется наибольшая максимальная скорость и имеются уклоны до 40 ‰, а ICE-T наиболее удобен на относительно старых линиях с большим числом кривых.
В грузовых перевозках на сегодняшний день альтернативы локомотивной тяге нет.
9.Комбинированные системы общественного рельсового транспорта
Исторически сложилось так, что на наземный рельсовый транспорт в настоящее время приходится относительно малая доля внутригородских пассажирских перевозок. В Европе и Америке он не выдержал конкуренции со стороны частных автомобилей. Так, в настоящее время трамвайные сообщения функционируют примерно в 300 городах мира, тогда как между первой и второй мировыми войнами число таких городов было в 2 раза бóльшим.
Первые линии городского рельсового транспорта появились в Нью-Йорке в 1852 г., затем в Париже в 1853 г. Они проходили по улицам на уровне земли, не обособлялись от прочего уличного движения. Однако последние линии трамвая в Париже были закрыты в 1937 г., в Лондоне в 1961 г., чему способствовало наличие разветвленной сети метрополитена и автобусных маршрутов.
В настоящее время самым "трамвайным" городом мира является Санкт-Петербург. Ежегодно 2000 поездов трамвая перевозят по линиям общей протяженностью более 700 км около 1 млрд. пассажиров. На втором месте находится Москва с 1000 поездами трамвая, протяженностью линий 450 км и объемом перевозок около 400 млн. пассажиров в год. Трамвайные сообщения распространены в основном в городах Восточной и Центральной Европы. Наибольшим числом городов с трамвайным сообщением располагает Германия: здесь трамваи есть в 52 городах, причем в 20 из них численность населения не превышает 200 тыс. чел.
Городские администрации постепенно возвращаются к признанию общественного, особенно рельсового транспорта как действенного средства решения все осложняющихся транспортных проблем, важнейшей из которых является перегрузка улиц автомобилями, ведущая к образованию заторов, следовательно, к увеличению времени поездки, и загрязнению воздуха выхлопными газами. На первом этапе в столицах и крупнейших городах разных стран мира в расширяющихся масштабах строились линии подземного метрополитена. Затем и в менее крупных городах стали создавать сети метрополитена облегченного типа, линии которого частично проходили на уровне земли. И, наконец, в последнее время обратили внимание на трамвай, стоимость инфраструктуры и подвижного состава которого существенно ниже, чем метрополитена. Признаны такие достоинства трамвая, как высокая провозная способность и скорость движения поездов (при выделении обособленных полос), а также экологическая чистота (при принятии мер по уменьшению шумового воздействия на окружающую среду). Таким образом, возникли условия для возвращения трамвая в города.
В течение последних лет трамвай появился впервые или возродился примерно в 30 городах более 10 стран мира. До конца 2000 г. будет открыто еще более 10 трамвайных сетей, и до 100 проектов рассматриваются на пяти континентах, особенно в Азии, где потребности в общественном транспорте наибольшие. Однако в реальном осуществлении проектов лидируют США, где создаются 12 сетей, Франция (10) и Великобритания (4).
Система трамвай - поезд
Транспортные администрации многих городов Европы и Америки в последнее время стали проявлять интерес к концепции использования в общественном транспорте для перевозок между центром города и пригородами или между центрами близлежащих городов подвижного состава, способного обращаться по линиям как трамвайным, так и магистральных железных дорог. Концепция таких комбинированных транспортных систем получила название "трамвай- поезд" (tram- train). Еще 10 лет назад о ней мало кто задумывался, несмотря на то, что по большей части колея трамвайных и железнодорожных сетей одинаковая и технические проблемы в принципе преодолимы.
Обе системы рельсового транспорта имеют сходный по конструкции путь и основаны на общем принципе использования сцепления в системе колесо- рельс. Однако они традиционно были полностью отделены друг от друга и эксплуатировались по-разному, так что вопрос об их хотя бы частичном объединении никогда не возникал.
В то же время в ряде случаев возникал вопрос другого плана- о возможности пропуска поездов трамвая по неиспользуемым или мало используемым путям пригородных железнодорожных линий, что позволяло бы жителям ближайших пригородов без пересадки попадать в центр города. Подобным же образом пригородные поезда могли бы заходить в центр города по путям трамвайных линий. Такое сочетание двух видов общественного рельсового транспорта с совместным использованием инфраструктуры было бы весьма полезным для повышения эффективности работы общественного транспорта и создания дополнительных удобств для пассажиров при условии, естественно, решения сопутствующих проблем.
Потенциальный рынок для транспортных систем трамвай- поезд, судя по прогнозам и первым результатам реализации указанной концепции, имеет благоприятные перспективы развития. В Германии примером расширения трамвайной сети за счет железнодорожных путей служат Карлсруэ и Саарбрюккен, в Великобритании- Манчестер. Уже есть опыт международного сотрудничества в данной области: по этой концепции функционирует транспортная связь между Саарбрюккеном, Германия, и Саргемином, Франция.
Прорыв в указанном направлении произошел во второй половине 1980-х годов, когда муниципалитет города Карлсруэ, Германия, обратился к руководству железных дорог Германии (DBAG) с просьбой рассмотреть вопрос о пропуске поездов трамвая по примерно 20 км пригородной линии. Администрация городского транспорта Карлсруэ (AVG) эксплуатировала в то время 49 км внутригородских трамвайных линий. Первыми шагами стали приобретение у DBAG участка неиспользуемой грузовой линии длиной в несколько километров и реконструкция его для пассажирского движения. Через 4 года, в ноябре 1998 г., после исследований и испытаний AVG и DBAG подписали соглашение, утвержденное соответствующими властями, об условиях совместной эксплуатации участка Карлсруэ- Бреттен. Движение поездов трамвая по этому участку было открыто в сентябре 1992 г. Эта транспортная система получила название CityLink.
Общая длина системы CityLink несколько превышает 30 км. Она включает 6,4-км линию трамвая в пределах города Карлсруэ, новую, специально построенную соединительную линию длиной 2,8 км и эксплуатируемый участок DBAG длиной 21 км до Бреттена; по последнему участку движение обычных пассажирских и грузовых поездов продолжается, как и ранее. В системе используется подвижной состав на две системы тягового электроснабжения: трамвайную 750 В постоянного тока и железнодорожную 15кВ, 162/3Гц переменного тока
Общая численность населения зоны, охватываемой CityLink, составляет более 500 тыс. чел., в том числе 270 тыс. жителей Карлсруэ. За истекшее с момента открытия время объем перевозок новой транспортной системы увеличился почти в 2 раза.
В 1996 г. подобным же образом было организовано движение поездов трамвая по путям DBAG в другую сторону от Карлсруэ- до Баден-Бадена.
Через 5 лет после Карлсруэ система комбинированного рельсового транспорта была открыта в Саарбрюккене, городе с населением 250 тыс. чел. В сентябре 1997 г. введена в эксплуатацию транспортная система Saarbahn длиной 19 км в южном от Саарбрюккена направлении, из которых 1 км проходит по территории Франции (от границы до Саргемина). Успешная эксплуатация первой в мире международной связи по системе трамвай- поезд побудила соответствующие органы к разработке других подобных связей между городами Германии, Франции и Бельгии (Мюлуз- Фрайбург, Страсбур- Кель, Лилль- Турне и т. п.).
Реализация проекта в Саарбрюккене заняла меньше времени, чем в Карлсруэ (5 лет вместо 8), несмотря на дополнительные проблемы, связанные с пересечением границы и постройкой нового участка длиной 5 км. Ее успех способствовал развертыванию работ к северу от Саарбрюккена, где система Saarbahn будет состоять из 11-км участка линии DBAG и нового участка длиной 14 км. Есть план связать немецкий город Гершвайлер, также в земле Саар, с французским Форбахом. Таким образом, в Сааре будет создана сеть транспортных систем трамвай- поезд, обслуживающая регион с населением более 1 млн. чел.
За первый год эксплуатации системы Saarbahn (рис. 9.1) в 250-местных поездах постройки компании Bombardier перевезено 8 млн. пассажиров, т. е. на 20 % больше, чем перевозили годом ранее по указанному маршруту поезда трамвая, DBAG и автобусы, вместе взятые.

Рисунок 9.1. Поезд транспортной системы Saarbahn в Саарбрюккене
Среднесуточный объем перевозок на 10 % превысил прогнозировавшийся. Доля системы в общем пассажиропотоке достигла 50 %, в то время как ранее доля пригородных поездов DBAG не превышала 10 %.
Около 20 городов Германии, имеющих трамвайные сообщения, проявили интерес к сотрудничеству с DBAG, другими железнодорожными операторами, компаниями- изготовителями подвижного состава в создании аналогичных транспортных систем. Полагают, что система трамвай- поезд оптимальна для транспортного обслуживания регионов с населением порядка 500 тыс. чел.
По мере того как системы комбинированного рельсового транспорта приобретали признание в качестве полноправных участников процесса пассажирских перевозок наряду с традиционными системами, прояснялись возникающие вопросы и находились ответы на них, но одновременно повышались требования со стороны причастных транспортных администраций. Компании-операторы стараются решать проблемы совместимости полностью независимых, различных с технической точки зрения и по-разному управляемых транспортных систем на одной инфраструктуре. По общему мнению, согласования технических параметров подвижного состава, постоянных сооружений и устройств, унификации эксплуатационных процедур недостаточно. Требуется более разносторонний подход, соответствующий условиям каждого отдельного случая.
Для таких транспортных систем, как трамвай- поезд, основной проблемой остается обеспечение безопасности при столкновениях. Подвижной состав системы должен представлять пользователям сочетание качеств, присущих как трамваю (доступность, комфорт, вписывание в городскую среду), так и поезду (высокая, как правило, бóльшая, чем у обычного трамвая, скорость, достаточная пассажировместимость, сопротивляемость ударным нагрузкам).
Последний аспект характеризуется тем, что в течение длительного времени требования к ударной прочности подвижного состава трамвая и железных дорог, обеспечивающей безопасность пассажиров при столкновениях, существенно отличались. Так, для вагонов поездов магистральных железных дорог величина лобовой ударной нагрузки, воспринимаемой без разрушения основной конструкции и, следовательно, без ущерба для здоровья пассажиров, во многих странах определена равной 150 т. В США действуют более строгие стандарты, в Азии и Африке - менее строгие. Для вагонов трамвая с учетом меньшей скорости движения и вероятности столкновений в общем случае считается достаточной сопротивляемость ударной нагрузке 50 т, причем эта величина тоже варьируется в некоторых пределах в зависимости от местных условий.
Разница между 150 и 50 т и послужила, в частности, одной из причин отсутствия у SNCF планов по совместному использованию железнодорожной инфраструктуры. Напротив, железные дороги Германии и Швейцарии проявили бóльшую гибкость и несколько лет назад снизили требования к ударной прочности подвижного состава облегченного типа до 60 т, объясняя это спецификой эксплуатации и техническим прогрессом в областях проектирования и материаловедения, позволившим, например, вводить в конструкцию подвижного состава деформируемые элементы, поглощающие энергию соударения. Разработаны и другие меры активной и пассивной безопасности, обеспечивающие достаточную прочность даже при уменьшении массы.
В подвижном составе новейших систем трамвай- поезд, вводимом в эксплуатацию после 1997 г., удалось совместить эксплуатационную гибкость двухсистемного подвижного состава транспортной системы CityLink в Карлсруэ, позволяющую ему обращаться по линиям, электрифицированным на разных родах тока, и высокий уровень комфорта современных поездов трамвая, например наличие пола пониженного уровня, облегчающего и ускоряющего посадку и высадку пассажиров.
Компании-изготовители также вводят в подвижной состав таких систем элементы внутреннего оснащения, прежде характерные только для вагонов пассажирских поездов, например установки кондиционирования воздуха, кресла с изменяемым углом наклона спинок, перегородки, выделяющие в общем салоне отдельные купе, и т. п.
Подвижной состав систем трамвай- поезд в Германии оснащается выдвижными ступенями у входных дверей для компенсации разницы уровней пола тамбуров и посадочных платформ. В тяговом приводе применяются преобразовательные установки и двигатели, позволяющие развивать скорость до 100 км/ч. В то же время это обусловливает определенное увеличение стоимости подвижного состава (до 4,8 млн. нем. марок за 200-местный поезд), отражающееся на эксплуатационных расходах. Так, в Саарбрюккене повышение уровня комфорта и выполнение требований, обеспечивающих совместимость трамвая и железных дорог, обходится в 8,5 марки/поездо-км, или 5 млн. марок в год, что вынуждает увеличивать цену каждого билета на 0,5 марки. Однако, по общему мнению, эти затраты считаются оправданными.
Все сказанное объясняет, почему термин "трамвай- поезд" становится все более привычным для администраций городского общественного транспорта и железных дорог многих стран. Использование этой концепции открывает путь к возвращению рельсового транспорта в города и дает возможность решить многие проблемы внутригородских и пригородных пассажирских перевозок.
10.Скоростной пассажирский трубопровод
Этот скоростной пассажиро-трубопровод называется FTS (Fast Tube System). Придумали его англичане. FTS представляет собой сеть труб с проложенными в них обычными железнодорожными рельсами, а также N-ное количество станций для приёма пассажиропотока, который по этим трубам и планируется направить.
Само собой, как и в описании любого, транспортного проекта ХХI века, в первую очередь, любопытствующим представляются глобальные достоинства проекта. Они обычно одинаковые, но в этот раз некоторые назовём: во-первых, экология, пробки на дорогах и подобное, во-вторых, это альтернатива всему общественному транспорту и, наконец, в-третьих, FTS — дёшево и совсем не сердито. Быстро, удобно, никаких проблем.
Изобретатели пишут, что самым затратным в FTS будет возведение станций. Всё остальное ерунда: прокладка труб — тот же водопровод, капсулы — дешевле автомобилей. Действовать система будет целиком и полностью автоматически, так что и на персонал особо тратиться не надо. Стартовые инвестиции и вперёд к фантастическим прибылям и экологически чистому миру.
Проектировщики придумали, что в трубах, которых должно быть две (туда и обратно), будет вакуум — он-то и обеспечит скорость, бесшумность и отсутствие воздушного сопротивления. Внутри же, по замыслу британских разработчиков, капсула — это система жизнеобеспечения и беззаботного времяпрепровождения с диваном, телевизором и, что немаловажно, системой подачи воздуха. Никаких средств управления в капсуле нет — незачем (рис.10.1).
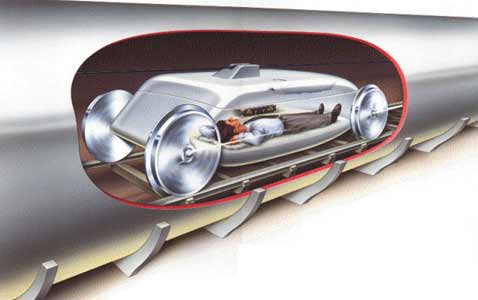
Рисунок 10.1. Конструкция пассажирского трубопровода
Все капсулы Fast Tube System движутся с одинаковой скоростью и в унисон. Как быть с питанием — разработчики до конца не определились: решено, что это будет электричество, а вот как подвести энергию пока не ясно. Конструкторы пишут, что да, это "конечно, одна из главных проблем проекта", ну да мы что-нибудь придумаем.
Впрочем, не будем останавливаться на "мелочах" — для FTS итак уже много чего придумано интересного: дизайн станций, например, комфорт и сервис для пассажиров.
Каждая станция хранит в вакуумном отстойнике некоторое количество капсул.
И вообще, капсулы (пустые и полные) циркулируют по FTS удивительно чётко - автоматически. Для трубопровода авторы проекта придумали "Автоматическую систему управления". Это царь и Бог FTS, его надо принять как должное и двигаться дальше.
Отважившиеся стать пассажирами подходят к компьютеру, выбирают маршрут, оплачивают поездку и ждут. Вокзал есть вокзал. Вскоре голос из репродуктора под потолком объявляет, к какому выходу должны подойти отъезжающие — так же, как в переговорном пункте называют номер телефонной кабины.
"Карета" подана, пассажир заходит в неё, как в лифт, после чего вакуумная "упаковка" автоматически закрывается, капсула принимает горизонтальное положение, выезжает из станционного "аппендицита" во "вторую трубу", где происходит первое ускорение, а затем — в Главную трубу. 420 км/час.
Хотя авторы проекта и пишут, что в прямой трубе скорость выше, им известно о том, что труба должна изгибаться — разработали 12 вариантов изгиба.
Да, есть ещё несколько "мелочей" и "главных проблем": как ни крути, но капсулам иногда придётся двигаться с разной скоростью — ускоряться, замедляться перед станциями — это, как пишут конструкторы — "существенные технические препятствия".
Теперь о комфорте и сервисе для пассажиров. Начнём с того, что при входе в капсулу "они будут испытывать не больший психологический дискомфорт, чем при входе в лифт". Не будет дискомфорта и внутри: здесь идеальный искусственный климат, а на всякий случай — кислородные маски.
Ещё рассматривается вариант с подушкой безопасности — такой же, как в автомобилях: "воздушная подушка должна быть достаточно большой, чтобы фактически заполнить капсулу, таким образом, зафиксировав пассажира на поверхности уютной кровати в безопасном, но сильно ограниченном положении. Однако поставка воздуха после развёртывания подушки могла бы быть связана с некоторыми специфическими трудностями".
Ремни безопасности — дело сугубо добровольное: "в случае механической поломки (колёса, рельсы, тормоза) система безопасна, но если такая поломка случится, то последствия будут очень серьёзными, как несчастный случай в воздухе".
Перегрузки при ускорении и замедлении предлагается минимизировать за счёт эргономики пассажирского места. В случае проблем пассажир сможет сообщить о них посредством видеосвязи, оплата производится кредитной карточкой. С помощью всё той же видеосвязи можно заказать себе такси к станции следования.
11.Индивидуальные летательные аппараты
Одна из первых моделей миниатюрного разборного вертолёта была создана компанией Hiller Helicopters в 1954 году. Она называлась Rotorcycle, и была создана специально для американских военных лётчиков (рис.11.1). На ней пилоты должны были возвращаться к "своим" через линию фронта, если их самолёты были сбиты над вражеской территорией. Сброшенный с парашютом Rotorcycle пилоты собирали бы вручную без каких-либо подручных инструментов в течение нескольких минут.

Рисунок 11.1. Rotorcycle
10 января 1957 года опытный образец Rotorcycle поднялся в небо. По результатам испытаний был заключён контракт с английским авиационным заводом Сандерса Роя (Saunders Roe) на создание ещё десяти вертолётов. В итоге, к концу 1961 года было построено двенадцать Rotorcycles: семь военных (XROE-1 и YROE-1) и пять гражданских (G-46).
Военные "вертушки" были отправлены в США для дальнейших испытаний, три вертолёта в ноябре 1962 года приобрёл исследовательский центр NASA (NASA Ames Moffett Field), а ещё два остались где-то в Европе. Rotorcycle так и не был принят на вооружение - американские военные по какой-то причине отказались от него ещё до окончания испытаний.
В конце 1999-го года у американцев появились неожиданные последователи - японская компания «Engineering System». Она представила свою модель GEN H-4. 70-килограммовый пилот может летать на ней без дозаправки целый час со скоростью до 88 км/час. Максимальный вес, который способен поднять вертолет - 86 кг. При взгляде на фотографии схожесть моделей становится очевидной (рис.11.2).

Рисунок 11.2. Миниатюрный вертолет компании «Engineering System»
Вертолёт приводится в движение четырьмя суперлёгкими двигателями (40 лошадиных сил), но если один из двигателей выйдет из строя, GEN H-4 может лететь и на трёх, а экстренную посадку совершить и на двух.
Каждый двигатель работает автономно, и разработчики считают маловероятной поломку всех двигателей сразу. Но и на такой непредвиденный случай в комплект GEN H-4 входит парашют.
Топливо для вертолёта - это смесь автомобильного бензина с маслом для двухтактных двигателей в соотношении 30:1. В баке помещается от 2 до 5 галлонов топлива.
Представители Engineering System уверяют, что срок обучения для пилотов минимальный (от двух часов) и нужен больше для их же безопасности: управление достаточно бесхитростное. Панель управления расположена прямо перед пилотом между двумя ручками, как на мотоцикле. Основные кнопки расположены справа и слева: на них удобно нажимать большими пальцами.Разработчики планирует поместить на панели определитель высоты, а под сиденьем баллоны с кислородом, так как одноместный геликоптер сможет подниматься в области разреженного воздуха. Ориентировочная стоимость вертолёта ~ 30000 $.
Второе устройство для индивидуальных полётов называется ракетный ранец. Его называют по разному- Small Rocket Lift Device, Bell Rocket Belt, Personal Jetpack, Rocket Backpack, Jet Pack, Jet Flying Belt, Jet Belt, Jet Vest и так далее - но достоверной информации об этом "средстве передвижения" крайне мало
Хотя первый короткий эксперимент с размещением на спине пороховых ракет, запечатлела ещё немецкая кинохроника 30-х годов (зрители видят быструю и достаточно жёсткую "посадку" на землю испытателя) - идею о техническом воплощении ракетного ранца приписывают Уэнделлу Муру (Wendell Moore), инженеру из компании Bell Aerospace. В 1953 году Мур взялся за разработку ранца, получившего тогда неромантичное название "Маленькое ракетное подъёмное устройство" (Small Rocket Lift Device - SRLD). Первую версию SRLD в 1958 году Уэнделл Мур испытал сам.
Несмотря на сомнительный успех первых коротких "полётов" на небольшое расстояние, разработка устройства в Bell Aerospace продолжалась - были добавлены рычаги управления, усовершенствована конструкция и так далее, но сделать ранец по-настоящему безопасным всё же не удавалось. В конечном счёте, были достигнуты 20-секундная продолжительность полёта с максимальной высотой 4,5 метра.
В 1959 году был заключён контракт с аэрокосмической компанией Aerojet-General, которая должна была всесторонне изучить и испытать SRLD. Экспериментировать с устройством начала и компания Reaction motors (RMI).Позже американские военные вели переговоры с Bell Aerospace относительно изготовления SRLD и, в итоге, контракт с Army's Transportation, Research and Engineering Command (TRECOM) был подписан, а Мур стал техническим директором проекта SRLD.
После подписания контракта был создан 280-фунтовый ракетный двигатель, а в качестве самого безопасного топлива выбрана перекись водорода (Peroxide). Муру в качестве лётчика-испытателя SRLD в то время пришлось не раз испытывать своё изобретение на заводе Bell в Буффало, но после того, как одно из таких испытаний закончилось серьёзной травмой колена, изобретателю пришлось навсегда оставить мысль о полёте на своём устройстве.
Дело было передано другому инженеру, Гарольду Грэму (Harold Graham), который продолжил испытания и 20 апреля 1961 года совершил при помощи SRLD первый свободный полёт. Грэм за 13 секунд пролетел со скоростью 16 км/час расстояние в 34 метра.
Первые показательные выступления состоялись 8 июня 1961 года, конечно же, перед военными в Fort Eustice в Вирджинии, но более удачной была демонстрация возможностей SRLD на лужайке у Пентагона.
Затем реактивный ранец не раз демонстрировали на выставках, ярмарках и подобных мероприятиях, включая полёт перед президентом Кеннеди в Форте Bragg.
В конце 60-х Bell Rocket Belt ("Ракетный пояс") и лётчик-испытатель Билл Суитор (Bill Suitor) объездили почти весь мир и стали очень популярными - Суитор даже сыграл роль в кинофильме.
В 1965 году на экраны выходит фильм "Thunderball": Джеймс Бонд надевает ракетный ранец и говорит, что без этого устройства мужчина не может считать себя джентльменом.
Однако, несмотря на очевидную популярность, ракетный ранец что называется "не прижился". Главным образом из-за краткой продолжительности полёта и его сомнительной безопасности. Вскоре от ранца отказались и военные.
В 1969, когда Уэнделл Мур умер, Bell Aerospace пересмотрела свои планы относительно "Ракетного пояса" и в январе 1970 года уступила лицензию на продажу и производство устройства, к тому времени звавшемуся Bell Jet Belt, компании Williams International, которая взялась за развитие "ранца" с целью увеличить продолжительность полёта.
С тех пор реактивный ранец стал экзотикой. Лишь изредка его используют для его развлечения публики в перерывах на футбольных матчах, в рекламных шоу или для трюков в кино. Ракетный ранец видели на открытии Олимпийских Игр в 1984 году.
В настоящее время ракетные ранцы, сделанные Уэнделлом Муром, хранятся в музее Нью-йоркского Университета и в музее университетского городка Буффало.
О реактивном ранце вспомнили лишь в 1995 году: группа инженеров из Техаса разработала усовершенствованную и слегка увеличенную версию, названную RB 2000 Rocket Belt. Перепроектированный "пояс" позволял летать на 50% дольше, чем его "предок" - 30 секунд вместо 20.
Ракетное топливо состоит из трёх компонентов: перекиси водорода (hydrogen-peroxide propellant), газообразного азота под высоким давлением (high-pressure nitrogen gas) и нитрата серебра (samarium-nitrate-coated silver), который действует как катализатор.
Два металлических резервуара вмещают 23 литра перекиси водорода. Когда пилот открывает клапан, выпущенный под давлением газ азота выталкивает пероксид в камеру с катализатором, где происходит химическая реакция, в результате которой перекись водорода превращается пар с температурой 743 градуса Цельсия. Пар выходит наружу через две согнутых трубы за спиной пилота. Центр масс человека находится чуть ниже сопел, поэтому при полете сохранятся вертикальное положение тела. Впереди, как подлокотники у кресла, 2 ручки управления. Они жестко сцеплены с ранцем за спиной, а вот у самого ранца есть небольшая свобода передвижений, его можно слегка наклонять в разные стороны. Под правой рукой регулятор мощности, управляющий реактивной струей.
Из-за высокой температуры отважившийся на полёт смельчак должен быть облачён в стойкий к высокой температуре костюм. Сам полёт длится всё те же 30 секунд, а максимальная скорость 161 км/час.
В настоящее время ни одна компания не занимается ракетными ранцами, если не считать Rocket Man Inc, которая в виде реактивных ранцев выпускает сумки-холодильники для напитков.
Заключение
Ускорение научно-технического прогресса на транспорте в современных условиях – задача много плановая, сложная и капиталоемкая, но она должна быть решена, так как не существует другого пути для выхода транспорта транспорта на уровень, отвечающий всем перспективным требованиям общества.
Современная жизнь характеризуется бурным развитием науки и техники вовсех сферах человеческой деятельности. Этот процесс предопределяет более быструю смену характера техники и технологии во всех отраслях народного хозяйства, включая и сам транспорт.
В наше время научно-технический прогресс развивается лавинообразно: в прошлом от возникновения идеи до ее реализации проходили столетия и десятилетия, теперь – нередко считанные годы.
В результате происходит быстрое моральное старение техники, возникает необходимость все в новых и новых открытиях. Новые виды транспорта призваны облегчить жизнь человека, сделав ее еще более комфортной, но при этом от них требует соблюдение всех экологических норм, которые с каждым днем становятся все жестче.
Новые виды транспорта, краткая характеристика которых была дана в этой работе, являются лишь малой часть всех тех усовершенствований, которые сделаны человеком за последние несколько лет. Одни из них являются ныне действующими системами, другие ожидают введения в эксплуатацию после идущих в настоящее время испытаний, третьи – слишком футуристичны и дорогостоящи на сегодняшний день (но и они могут воплотиться в жизнь в ближайшем будущем). Но все они уже сегодня помогают обществу решить те насущные проблемы, которые возникли в результате деятельности людей, и этот процесс уже нельзя остановить.
Литература:
1. Аксенов И.Я. Единая транспортная система: Учеб. для вузов – М: Высш. шк., 199.
2. Гулиа Н.В., Юрков С. Новая концепция электромобиля: Наука и техника – 2000 - №2.
3. Пополов А. Индивидуальный электротраспорт XXI века: Наука и техника – 2001 - №8.
4. Постников Д. Электромобиль: «за» и «против»: За рулем – 1997 - №2.
5. Пополов А. Электровелосипед сегодня и завтра: Наука и техника – 1999 - №8.
6. Новый городской транспорт – автомобиль на рельсах: MEMBRANA – 2002 – №1.
7. Монокар – двухколесный автомобиль: ООО «Скиф», 2002.
8. Каримов А.Х. Беспилотные самолеты: максимум возможностей: Наука и Жизнь – 2002 - №6.
9. Пополов А. «Солнечным» судам счастливого плавания: Наука и Жизнь – 2001 - №6.
10. Измеров О. Самолет садится на рельсы: Неизвестный отечественный монорельс.
11. Моторвагонные поезда – альтернатива локомотивной тяге: Железные дороги мира – 2002 - №1.
12. Батисс Ф. Комбинированные системы общественного рельсового транспорта: Железные дороги мира – 2000 - №8.
13. Fast Tube System — скоростной пассажирский трубопровод: MEMBRANA – 2002 – №5.
14. Лесков И.В. Индивидуальные летательные аппараты: Границы бесконечности – 2002 - №1.